Timed GPIO驱动程序分析
Timed GPIO驱动程序是android系统基于linux内核新增加的一类驱动程序,这类驱动程序主要是运用了内核定时器,与内核定时器进行绑定,使得控制GPIO口的高低电平与时间打上关系,既可以实现在一定的时间实现GPIO口为高或者低电平。Timed GPIO驱动被实现为平台设备驱动,Timed GPIO驱动源码位于如下目录:\kernel\drivers\staging\android
Timed GPIO驱动程序主要包括如下几个文件:
Timed_gpio.c
Timed_gpio.h
Timed_output.c
Timed_output.h
Timed_gpio.c文件为具体的驱动程序,Timed_output.c为向sys文件系统注册类的框架代码,
下面将具体分析每一个文件的作用及实现的具体功能。
首先分析注册类的框架代码 :Timed_output.c Timed_output.h
Timed_output.h文件分析:
struct timed_output_dev {
const char *name;
void (*enable)(struct timed_output_dev *sdev, int timeout);
int (*get_time)(struct timed_output_dev *sdev);
struct device *dev;
int index;
int state;
};
extern int timed_output_dev_register(struct timed_output_dev *dev);
extern void timed_output_dev_unregister(struct timed_output_dev *dev);
Timed_output.h文件主要定义了一个结构体timed_output_dev设备结构体,该结构体表示一个具体的设备,
Name:代表Time GPIO设备的名字,enable:为一个函数指针,主要用于设置定时器的过期时间,
Enable:用于获取离过期还剩余的时间。Index:为设备索引号,代表同一名字的设备的数量,state带表当前设备的状态值。
timed_output_dev_register,timed_output_dev_unregister这两个函数声明用于timed_output设备的注册和卸载。
Timed_output.c文件分析:
该文件主要用于向系统注册timed_output驱动程序框架,其中主要实现了Timed_output.h文件中定义的结构体及函数。
timed_output框架注册函数的实现,这个函数用于将驱动程序注册到kernel中,后面分析Timed GPIO驱动的具体实现时会调用此函数向系统注册Timed GPIO驱动。
int timed_output_dev_register(struct timed_output_dev *tdev)
{
int ret;
if (!tdev || !tdev->name || !tdev->enable || !tdev->get_time)
return -EINVAL;
ret = create_timed_output_class(); 调用此函数在sys/class下生成timed_output类
if (ret < 0)
return ret;
tdev->index = atomic_inc_return(&device_count);
tdev->dev = device_create(timed_output_class, NULL,
MKDEV(0, tdev->index), NULL, tdev->name);
if (IS_ERR(tdev->dev))
return PTR_ERR(tdev->dev);
ret = device_create_file(tdev->dev, &dev_attr_enable);
if (ret < 0)
goto err_create_file;
dev_set_drvdata(tdev->dev, tdev);
tdev->state = 0;
return 0;
err_create_file:
device_destroy(timed_output_class, MKDEV(0, tdev->index));
printk(KERN_ERR "timed_output: Failed to register driver %s\n",
tdev->name);
return ret;
}
此函数用于在sys/class下面创建类,类的名字为timed_output
static int create_timed_output_class(void)
{
if (!timed_output_class) {
timed_output_class = class_create(THIS_MODULE, "timed_output");
if (IS_ERR(timed_output_class))
return PTR_ERR(timed_output_class);
atomic_set(&device_count, 0);
}
return 0;
}
其中下面两个函数最为关键,是内核空间和用户空间的传值过程的具体实现函数,
enable_show函数调用get_time函数并将返回的剩余时间写入buf并传递到用户空间。
static ssize_t enable_show(struct device *dev, struct device_attribute *attr,
char *buf)
{
struct timed_output_dev *tdev = dev_get_drvdata(dev);
int remaining = tdev->get_time(tdev);
return sprintf(buf, "%d\n", remaining);
}
enable_store函数用于将用户空间传递来的buf值写入内核空间。
static ssize_t enable_store(
struct device *dev, struct device_attribute *attr,
const char *buf, size_t size)
{
struct timed_output_dev *tdev = dev_get_drvdata(dev);
int value;
if (sscanf(buf, "%d", &value) != 1)
return -EINVAL;
tdev->enable(tdev, value);
return size;
}
Timed_gpio.h文件分析:
#ifndef _LINUX_TIMED_GPIO_H
#define _LINUX_TIMED_GPIO_H
#define TIMED_GPIO_NAME "timed-gpio" //Time_GPIO驱动的名字,将显示在/sys/class/ timed_output目录下
struct timed_gpio {
const char *name; //GPIO的名字
unsigned gpio; //具体的GPIO管脚
int max_timeout;//最大的超时时间
u8 active_low; //IO口电平状态表示位
};
timed_gpio结构体仅用于定义单个的GPIO的相关信息
gpio_platform_data结构体用于定义一组GPIO的相关信息
struct timed_gpio_platform_data {
int num_gpios;
struct timed_gpio *gpios;
};
#endif
下面将分析具体的Timed_gpio驱动程序
timed_gpio_driver定义如下:
该函数指明了具体的初始化函数(pore)和移除函数(remove)以及驱动的名字额模块。
static struct platform_driver timed_gpio_driver = {
.probe = timed_gpio_probe,
.remove = timed_gpio_remove,
.driver = {
.name = TIMED_GPIO_NAME,
.owner = THIS_MODULE,
},
};
调用platform_driver_register函数向kernel注册平台驱动
static int __init timed_gpio_init(void)
{
return platform_driver_register(&timed_gpio_driver);
}
timed_gpio探测函数
static int timed_gpio_probe(struct platform_device *pdev)
{
struct timed_gpio_platform_data *pdata = pdev->dev.platform_data;
struct timed_gpio *cur_gpio;
struct timed_gpio_data *gpio_data, *gpio_dat;
int i, j, ret = 0;
if (!pdata)
return -EBUSY; //为pdata->num_gpios个GPIO分配内存空间
gpio_data = kzalloc(sizeof(struct timed_gpio_data) * pdata->num_gpios,
GFP_KERNEL);
if (!gpio_data)
return -ENOMEM;
for (i = 0; i < pdata->num_gpios; i++) {
cur_gpio = &pdata->gpios[i];
gpio_dat = &gpio_data[i];
hrtimer_init(&gpio_dat->timer, CLOCK_MONOTONIC,//初始化定时器
HRTIMER_MODE_REL);
gpio_dat->timer.function = gpio_timer_func;//定时器回调函数
spin_lock_init(&gpio_dat->lock);
gpio_dat->dev.name = cur_gpio->name;
gpio_dat->dev.get_time = gpio_get_time;
gpio_dat->dev.enable = gpio_enable;
ret = gpio_request(cur_gpio->gpio, cur_gpio->name);//申请GPIO
if (ret >= 0) {
ret = timed_output_dev_register(&gpio_dat->dev);//调用timed_output框架注册函数
if (ret < 0)
gpio_free(cur_gpio->gpio);
}
if (ret < 0) {
for (j = 0; j < i; j++) {
timed_output_dev_unregister(&gpio_data[i].dev);
gpio_free(gpio_data[i].gpio);
}
kfree(gpio_data);
return ret;
}
gpio_dat->gpio = cur_gpio->gpio;
gpio_dat->max_timeout = cur_gpio->max_timeout;
gpio_dat->active_low = cur_gpio->active_low;
gpio_direction_output(gpio_dat->gpio, gpio_dat->active_low);//初始化GPIO的输出值
}
platform_set_drvdata(pdev, gpio_data);
return 0;
}
初始化过程:
1. 首先调用kzalloc函数为 GPIO分配内存空间
2. 调用hrtimer_init函数初始化化内核定时器
3. 设置GPIO的enable函数为gpio_enable
4. 设置GPIO的get_time函数为gpio_get_time
5. 调用timed_output_dev_register函数注册设备驱动。
6. 初始化timed_gpio_data结构体
7. 调用gpio_direction_output函数设置GPIO的初始值。
GPIO驱动移除函数,调用timed_output_dev_unregister卸载驱动程序
static int timed_gpio_remove(struct platform_device *pdev)
{
struct timed_gpio_platform_data *pdata = pdev->dev.platform_data;
struct timed_gpio_data *gpio_data = platform_get_drvdata(pdev);
int i;
for (i = 0; i < pdata->num_gpios; i++) {
timed_output_dev_unregister(&gpio_data[i].dev);
gpio_free(gpio_data[i].gpio);
}
kfree(gpio_data);
return 0;
}
功能回调函数gpio_timer_func分析:定时器超时后将执行此函数,此函数根据active_low的值来设置GPIO的高低电平。
static enum hrtimer_restart gpio_timer_func(struct hrtimer *timer)
{
struct timed_gpio_data *data =
container_of(timer, struct timed_gpio_data, timer);
gpio_direction_output(data->gpio, data->active_low ? 1 : 0);
return HRTIMER_NORESTART;
}
gpio_enable函数为关键函数接受用户空间传过来的value值用于在一定时间里控制GPIO
static void gpio_enable(struct timed_output_dev *dev, int value)
{
struct timed_gpio_data *data =
container_of(dev, struct timed_gpio_data, dev);
unsigned long flags;
spin_lock_irqsave(&data->lock, flags);
/* cancel previous timer and set GPIO according to value */
hrtimer_cancel(&data->timer);
gpio_direction_output(data->gpio, data->active_low ? !value : !!value);
if (value > 0) {
if (value > data->max_timeout)
value = data->max_timeout;
//启动定时器函数
hrtimer_start(&data->timer,
ktime_set(value / 1000, (value % 1000) * 1000000),
HRTIMER_MODE_REL);
}
spin_unlock_irqrestore(&data->lock, flags);
}
到这里相信大家对Time GPIO驱动已经用了深刻的印象和认识。下面将用一幅图来说明整个Time GPIO驱动的调用过程。以总结回顾前面的分析。
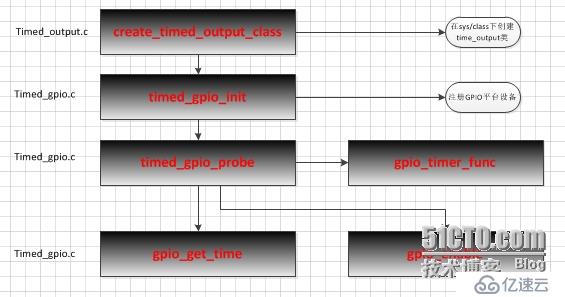
读者可以根据我的分析结合源代码具体了解每一步的调用过程。
注:以上整个过程实现了并创建了设备节点/sys/class/timed_output/timed-gpio
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





