使用Python+OpenCV实现实时眼动追踪,不需要高端硬件简单摄像头即可实现,效果图如下所示。
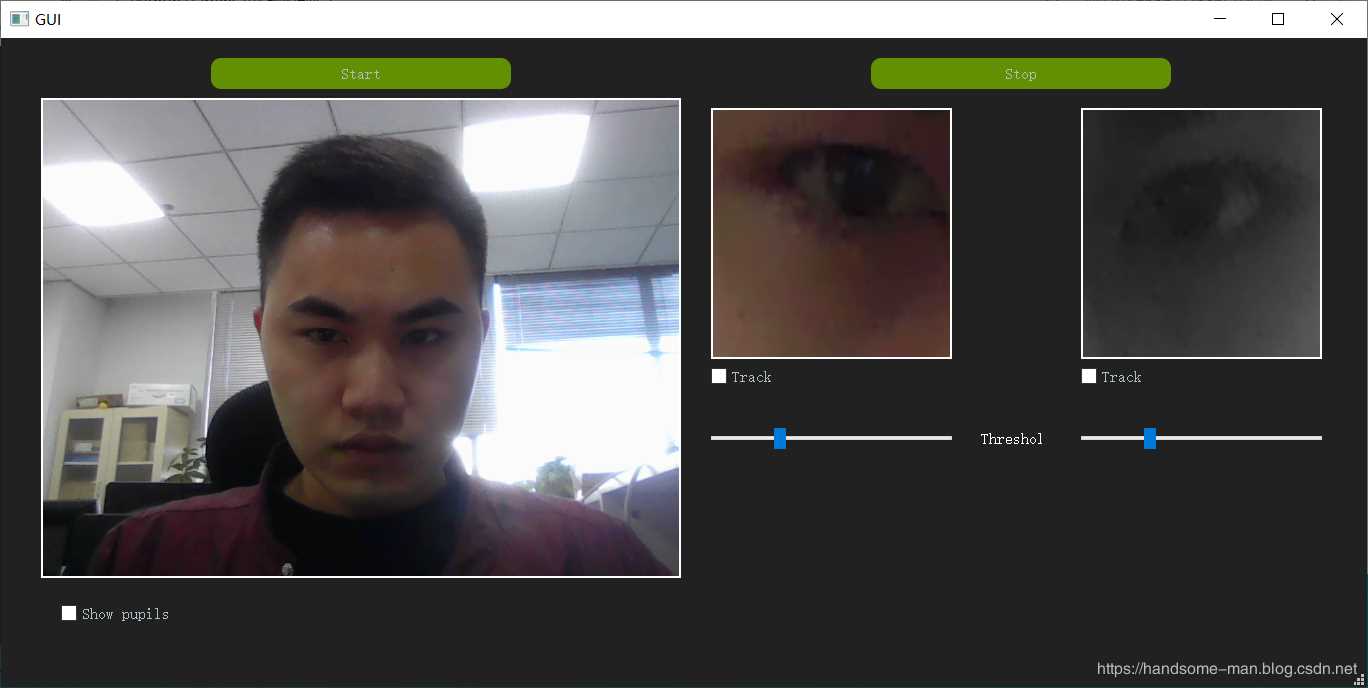
项目演示参见:https://www.bilibili.com/video/av75181965/
项目主程序如下:
import sys
import cv2
import numpy as np
import process
from PyQt5.QtCore import QTimer
from PyQt5.QtWidgets import QApplication, QMainWindow
from PyQt5.uic import loadUi
from PyQt5.QtGui import QPixmap, QImage
class Window(QMainWindow):
def __init__(self):
super(Window, self).__init__()
loadUi('GUImain.ui', self)
with open("style.css", "r") as css:
self.setStyleSheet(css.read())
self.face_decector, self.eye_detector, self.detector = process.init_cv()
self.startButton.clicked.connect(self.start_webcam)
self.stopButton.clicked.connect(self.stop_webcam)
self.camera_is_running = False
self.previous_right_keypoints = None
self.previous_left_keypoints = None
self.previous_right_blob_area = None
self.previous_left_blob_area = None
def start_webcam(self):
if not self.camera_is_running:
self.capture = cv2.VideoCapture(cv2.CAP_DSHOW) # VideoCapture(0) sometimes drops error #-1072875772
if self.capture is None:
self.capture = cv2.VideoCapture(0)
self.camera_is_running = True
self.timer = QTimer(self)
self.timer.timeout.connect(self.update_frame)
self.timer.start(2)
def stop_webcam(self):
if self.camera_is_running:
self.capture.release()
self.timer.stop()
self.camera_is_running = not self.camera_is_running
def update_frame(self): # logic of the main loop
_, base_image = self.capture.read()
self.display_image(base_image)
processed_image = cv2.cvtColor(base_image, cv2.COLOR_RGB2GRAY)
face_frame, face_frame_gray, left_eye_estimated_position, right_eye_estimated_position, _, _ = process.detect_face(
base_image, processed_image, self.face_decector)
if face_frame is not None:
left_eye_frame, right_eye_frame, left_eye_frame_gray, right_eye_frame_gray = process.detect_eyes(face_frame,
face_frame_gray,
left_eye_estimated_position,
right_eye_estimated_position,
self.eye_detector)
if right_eye_frame is not None:
if self.rightEyeCheckbox.isChecked():
right_eye_threshold = self.rightEyeThreshold.value()
right_keypoints, self.previous_right_keypoints, self.previous_right_blob_area = self.get_keypoints(
right_eye_frame, right_eye_frame_gray, right_eye_threshold,
previous_area=self.previous_right_blob_area,
previous_keypoint=self.previous_right_keypoints)
process.draw_blobs(right_eye_frame, right_keypoints)
right_eye_frame = np.require(right_eye_frame, np.uint8, 'C')
self.display_image(right_eye_frame, window='right')
if left_eye_frame is not None:
if self.leftEyeCheckbox.isChecked():
left_eye_threshold = self.leftEyeThreshold.value()
left_keypoints, self.previous_left_keypoints, self.previous_left_blob_area = self.get_keypoints(
left_eye_frame, left_eye_frame_gray, left_eye_threshold,
previous_area=self.previous_left_blob_area,
previous_keypoint=self.previous_left_keypoints)
process.draw_blobs(left_eye_frame, left_keypoints)
left_eye_frame = np.require(left_eye_frame, np.uint8, 'C')
self.display_image(left_eye_frame, window='left')
if self.pupilsCheckbox.isChecked(): # draws keypoints on pupils on main window
self.display_image(base_image)
def get_keypoints(self, frame, frame_gray, threshold, previous_keypoint, previous_area):
keypoints = process.process_eye(frame_gray, threshold, self.detector,
prevArea=previous_area)
if keypoints:
previous_keypoint = keypoints
previous_area = keypoints[0].size
else:
keypoints = previous_keypoint
return keypoints, previous_keypoint, previous_area
def display_image(self, img, window='main'):
# Makes OpenCV images displayable on PyQT, displays them
qformat = QImage.Format_Indexed8
if len(img.shape) == 3:
if img.shape[2] == 4: # RGBA
qformat = QImage.Format_RGBA8888
else: # RGB
qformat = QImage.Format_RGB888
out_image = QImage(img, img.shape[1], img.shape[0], img.strides[0], qformat) # BGR to RGB
out_image = out_image.rgbSwapped()
if window == 'main': # main window
self.baseImage.setPixmap(QPixmap.fromImage(out_image))
self.baseImage.setScaledContents(True)
if window == 'left': # left eye window
self.leftEyeBox.setPixmap(QPixmap.fromImage(out_image))
self.leftEyeBox.setScaledContents(True)
if window == 'right': # right eye window
self.rightEyeBox.setPixmap(QPixmap.fromImage(out_image))
self.rightEyeBox.setScaledContents(True)
if __name__ == "__main__":
app = QApplication(sys.argv)
window = Window()
window.setWindowTitle("GUI")
window.show()
sys.exit(app.exec_())
人眼检测程序如下:
import os
import cv2
import numpy as np
def init_cv():
"""loads all of cv2 tools"""
face_detector = cv2.CascadeClassifier(
os.path.join("Classifiers", "haar", "haarcascade_frontalface_default.xml"))
eye_detector = cv2.CascadeClassifier(os.path.join("Classifiers", "haar", 'haarcascade_eye.xml'))
detector_params = cv2.SimpleBlobDetector_Params()
detector_params.filterByArea = True
detector_params.maxArea = 1500
detector = cv2.SimpleBlobDetector_create(detector_params)
return face_detector, eye_detector, detector
def detect_face(img, img_gray, cascade):
"""
Detects all faces, if multiple found, works with the biggest. Returns the following parameters:
1. The face frame
2. A gray version of the face frame
2. Estimated left eye coordinates range
3. Estimated right eye coordinates range
5. X of the face frame
6. Y of the face frame
"""
coords = cascade.detectMultiScale(img, 1.3, 5)
if len(coords) > 1:
biggest = (0, 0, 0, 0)
for i in coords:
if i[3] > biggest[3]:
biggest = i
biggest = np.array([i], np.int32)
elif len(coords) == 1:
biggest = coords
else:
return None, None, None, None, None, None
for (x, y, w, h) in biggest:
frame = img[y:y + h, x:x + w]
frame_gray = img_gray[y:y + h, x:x + w]
lest = (int(w * 0.1), int(w * 0.45))
rest = (int(w * 0.55), int(w * 0.9))
X = x
Y = y
return frame, frame_gray, lest, rest, X, Y
def detect_eyes(img, img_gray, lest, rest, cascade):
"""
:param img: image frame
:param img_gray: gray image frame
:param lest: left eye estimated position, needed to filter out nostril, know what eye is found
:param rest: right eye estimated position
:param cascade: Hhaar cascade
:return: colored and grayscale versions of eye frames
"""
leftEye = None
rightEye = None
leftEyeG = None
rightEyeG = None
coords = cascade.detectMultiScale(img_gray, 1.3, 5)
if coords is None or len(coords) == 0:
pass
else:
for (x, y, w, h) in coords:
eyecenter = int(float(x) + (float(w) / float(2)))
if lest[0] < eyecenter and eyecenter < lest[1]:
leftEye = img[y:y + h, x:x + w]
leftEyeG = img_gray[y:y + h, x:x + w]
leftEye, leftEyeG = cut_eyebrows(leftEye, leftEyeG)
elif rest[0] < eyecenter and eyecenter < rest[1]:
rightEye = img[y:y + h, x:x + w]
rightEyeG = img_gray[y:y + h, x:x + w]
rightEye, rightEye = cut_eyebrows(rightEye, rightEyeG)
else:
pass # nostril
return leftEye, rightEye, leftEyeG, rightEyeG
def process_eye(img, threshold, detector, prevArea=None):
"""
:param img: eye frame
:param threshold: threshold value for threshold function
:param detector: blob detector
:param prevArea: area of the previous keypoint(used for filtering)
:return: keypoints
"""
_, img = cv2.threshold(img, threshold, 255, cv2.THRESH_BINARY)
img = cv2.erode(img, None, iterations=2)
img = cv2.dilate(img, None, iterations=4)
img = cv2.medianBlur(img, 5)
keypoints = detector.detect(img)
if keypoints and prevArea and len(keypoints) > 1:
tmp = 1000
for keypoint in keypoints: # filter out odd blobs
if abs(keypoint.size - prevArea) < tmp:
ans = keypoint
tmp = abs(keypoint.size - prevArea)
keypoints = np.array(ans)
return keypoints
def cut_eyebrows(img, imgG):
height, width = img.shape[:2]
img = img[15:height, 0:width] # cut eyebrows out (15 px)
imgG = imgG[15:height, 0:width]
return img, imgG
def draw_blobs(img, keypoints):
"""Draws blobs"""
cv2.drawKeypoints(img, keypoints, img, (0, 0, 255), cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
以上就是本文的全部内容,希望对大家的学习有所帮助,也希望大家多多支持亿速云。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





