相关法律法规已不再是主要制约瓶颈
自动驾驶汽车技术发展也使得全球各国政府加紧制定与其相关的法律法规。

算法与数据:自动驾驶企业开始拥抱开源数据集
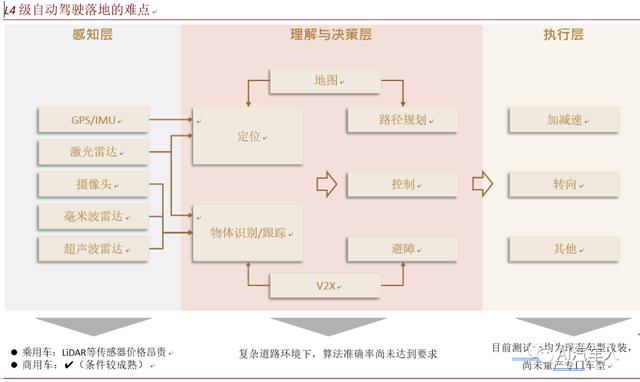
当前 L4 级自动驾驶的关键难点在于,现有算法无法准确处理复杂环境下无限可能的长尾场景。一旦长尾场景算法的难点得以攻破,自动驾驶的安全隐忧将大幅缓解, 我们认为自动驾驶有望加速商业化进程。商业化将带来自动驾驶零部件及整车的大规模量产,从而降低传感器成本、推动产业链的快速成熟,感知层和执行层的当前困难自然得到解决。
分别从感知层、决策层、执行层来看,我们认为当前 L4 级自动驾驶落地的难点包括:
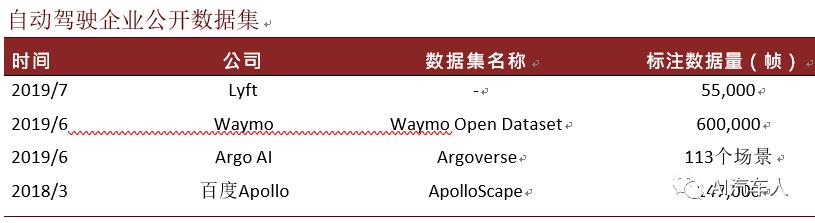
对于自动驾驶企业而言,数据是一项重要的资产,高质量的标注数据对于自动驾驶开发至关重要。过去,绝大部分自动驾驶企业严格保密自己的数据集,但目前正加速向开放转变。2018 年 3 月,百度 Apollo 率先发布了自动驾驶数据集 ApolloScape。2019 年 6 月, 在计算机视觉顶会CVPR 2019 上,Waymo 和Argo AI 也分别发布了公开的自动驾驶数据集,其中 Waymo Open Dataset 的标注数据量高达 60 万帧且传感器配置丰富,Argo AI 的Argoverse 数据集则是首个含有高清地图数据的公开数据集。紧接着,2019 年 7 月,Lyft 也发布了开源自动驾驶数据集。我们认为,考虑到当前自动驾驶在长尾场景遇到的困难, 单个企业很难独立建立和维护完善的数据集,因此自动驾驶数据开放是长期趋势,数据开放将助力自动驾驶行业突破算法瓶颈。

系统零缺陷是实现自动驾驶的核心挑战,L3 可能是短期最优动态平衡
汽车的道路安全是在实现自动驾驶的过程中的关键要素之一。我们认为,自动驾驶这样的复杂系统所追求的零缺陷目标正在成为其自身的制约因素。高等级自动驾驶意味着驾驶员注意力和时间的释放,在排除了人为因素后,也意味着加深了对设备安全性的依赖、
将自动驾驶系统的安全标准提到了更高的位置。
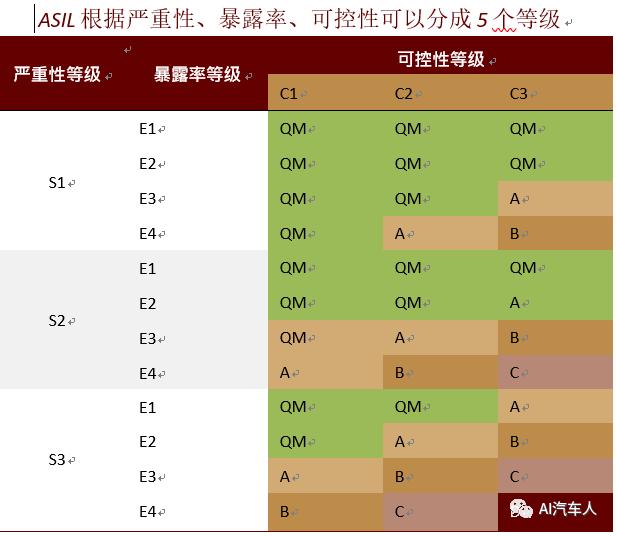
ISO26262 甄别关键硬件,并增加冗余。按照 ISO26262 的定义方法,自动驾驶系统的风险程度可以按照:
三个指标来考量,并分为功能安全等级 ASIL A/B/C/D 四个层级。其中 ASIL-A 是最低的安全等级、ASIL-D 是最高的安全等级,而 QM 则意味着系统要求和安全功能无关。ASIL 等级越高,对系统安全性要求越高,但同时意味着硬件的诊断覆盖率越高、开发流程越严密,导致开发成本上升、开发周期延长。
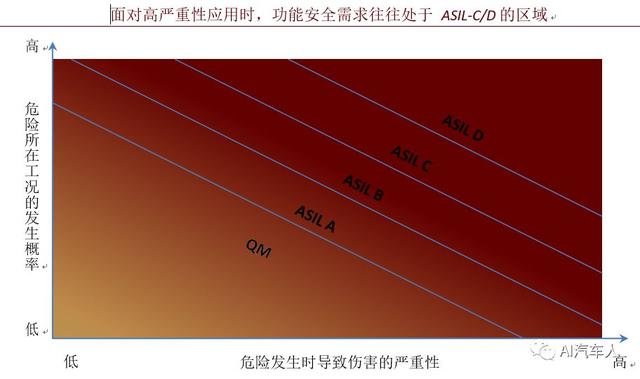
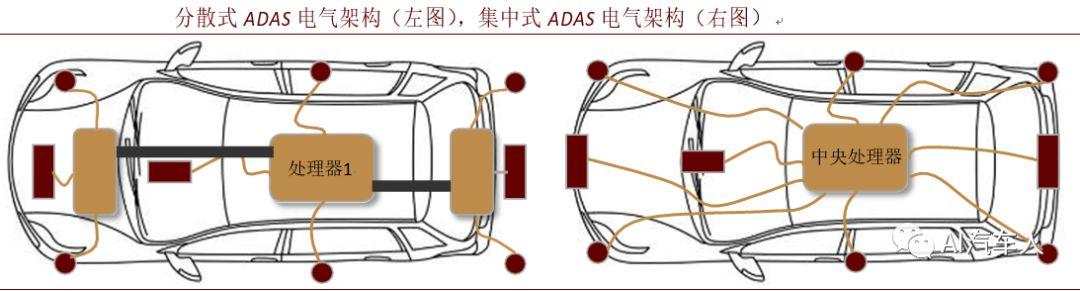
大部分高级自动驾驶的功能(例如自主转向、紧急制动)的失效都可能会导致驾驶人员的致命伤害,因此有较大可能性会被主机厂归为 ASIL-D 的安全级别,需要对众多关键子系统做出必要的冗余。

环境识别能力偏弱并非硬件物理缺陷,而是算法的不足
目前自动驾驶技术水平对外界环境做出无误的判断,仍有难度。受制于天气环境多样性、道路环境复杂性、车辆本身高速运动特性、传感器受到视角、光照、污损、遮挡等因素影响,没有一种理想的环境感知技术可以妥善处理所有的工况,需要多感知设备耦合并通过算法来弥补各种技术的短板。
因此对环境的识别能力难以趋于零缺陷,并非因为零部件物理缺陷,而更多是算法对复杂环境的处理能力不足。
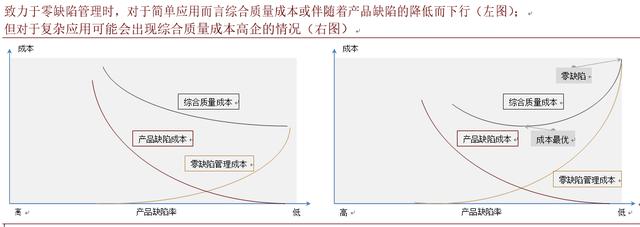
零缺陷管理并不免费,过程中带来产业利润池转移
产品缺陷自身毫无疑问会提升企业成本。带来的成本会包含失效分析、返工、重新检测、 质保费用、召回费用、周转延长等,所以当汽车系统质量较差、产品缺陷率较高,总体带来的质量成本就很高。高田气囊的产品缺陷造成了全球众多知名的整车企业(丰田、日产、本田、讴歌、马自达、福特等)超过千万车辆的召回,并直接导致了高田公司在 2017 年的破产;丰田在 2010 年因为油门踏板故障,也带来了约 20 亿美金的召回费用。
但零缺陷管理也并不是免费,其需要融入自动驾驶系统的研发过程、工艺流程、甚至需要重塑企业文化。
L3 级别自动驾驶进度是成本和缺陷率的动态平衡
对于自动驾驶来说,一味追求完全的“零”缺陷,短期内由于环境识别等领域准确度仍有不足,若堆砌大量的硬件则又带来极高的成本压力。我们认为 L3 水平的自动驾驶,是成本和缺陷率的动态平衡的结果,将一部分系统缺陷的结果交由驾驶员来处理,或许是真正实现“无人”驾驶之前必要的权衡之举。
https://www.toutiao.com/a6730196480230949383/
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





