激光雷达
随着智能驾驶技术的发展,激光雷达迅速的进入工程师的视野,不管是机械式、MEMS还是纯固态激光雷达,本质上都是以一定的速度扫描照射区域,在此过程中激光雷达不断的发出激光并接收反射信息。激光雷达的反射点信息包含了距离、时间和水平角度(Azimuth)等信息,同时结合激光发射器的固定垂直角度,即可以计算出反射点的坐标信息,每一次扫描中所有反射点的集合即为点云(Point Cloud)。而伴随着激光雷达的高精度带来的数据量爆发,点云数据的实时处理就成为工程师要面对的一大挑战。
当前阶段工程师处理点云的校准、分类和分割等任务。利用PCL(点云库)我们可以实现抽取点云特征、处理目标分类、目标分割及可视化等需求。同时在处理点云数据的同时也需要同步的考虑其他信号的接入,如视频、毫米波、各类总线信号等。
因此能否有合适的工具既可以同步的采集所需的各种数据,又能够方便的支撑工程师去进行开发,就是智能驾驶开发工程师需要直接面对的一个问题。
点云数据实时处理
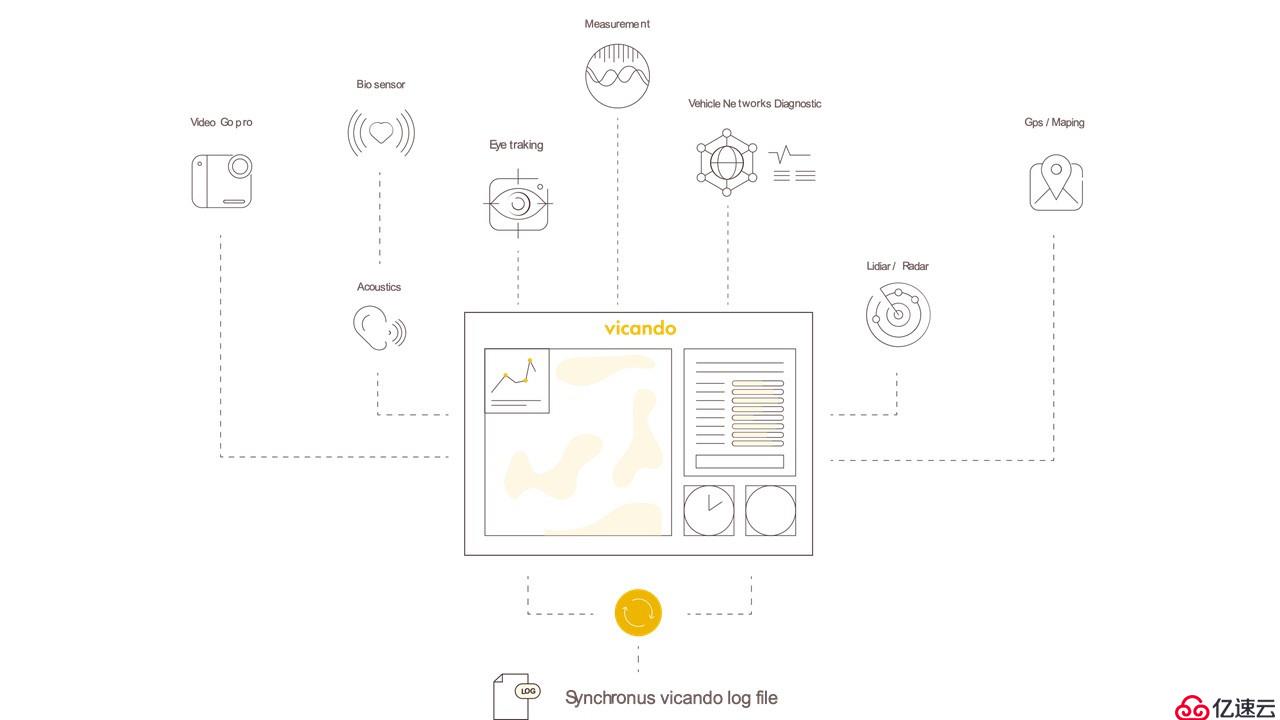
ViCANdo Suite是针对智能驾驶功能的开发和测试平台,能够同步的采集所需的各类数据,包括但不限于如下列表中的数据源,同时工具集成PCL(点云库),工程师可以直接使用PCL来进行相关的开发。
ViCANdo Suite直接支持的数据源:


• 示例应用:LIDAR点云数据处理
♦ 地面点云(平面)分割,系统采用两个16线激光雷达
♦ 目的:LIDAR探测到的点云中有相当数量是地面信号,不利于障碍物识别,且增加计算负担
♦ 方法:RANSAC(随机采样一致性)
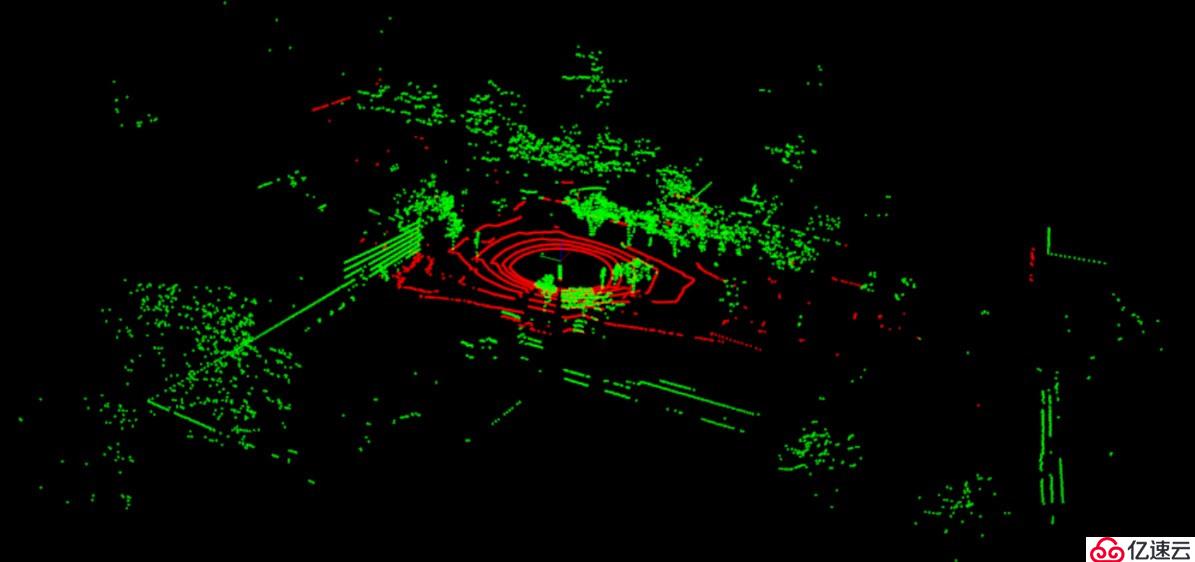
pcl::SACSegmentation
• 示例应用:障碍物聚类
♦ 方法:Euclidean聚类(只考虑空间距离或考虑intensity等额外条件)
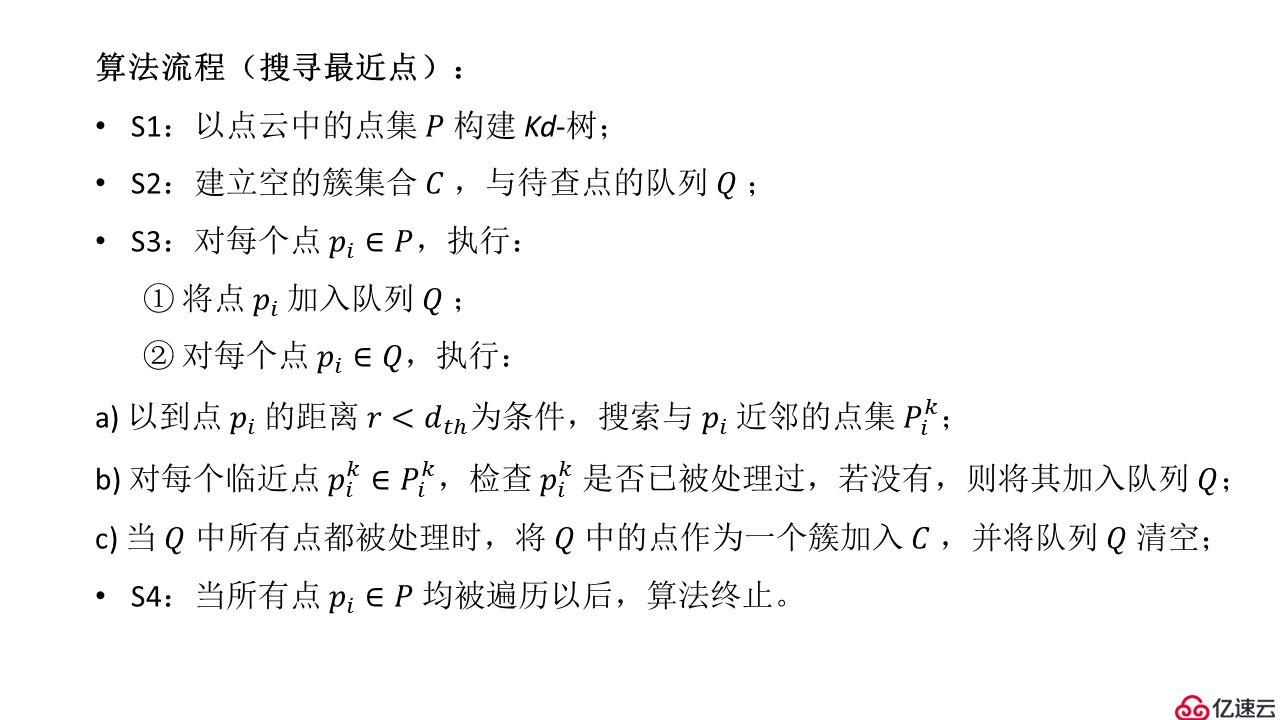

只考虑距离
pcl::EuclideanClusterExtraction

考虑距离和强度
intensitypcl::ConditionalEuclideanClustering
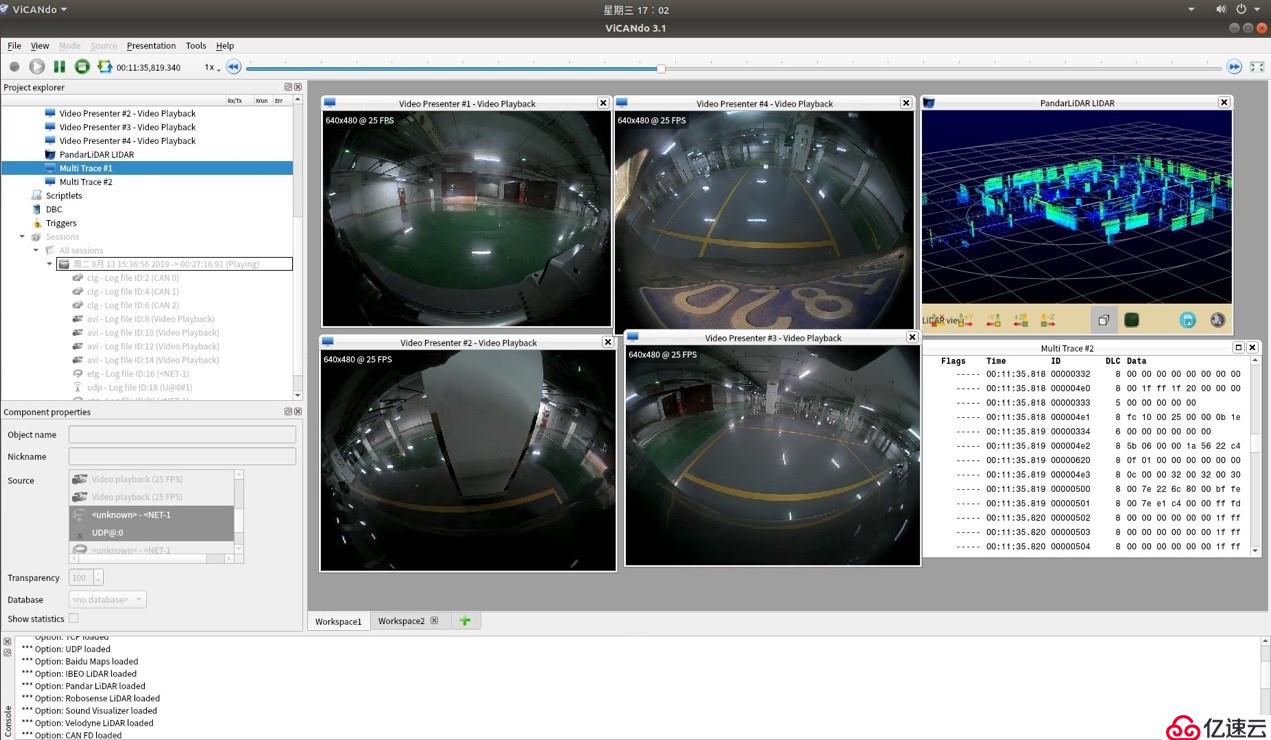
• 示例应用:ViCANdo的点云/视频显示处理界面
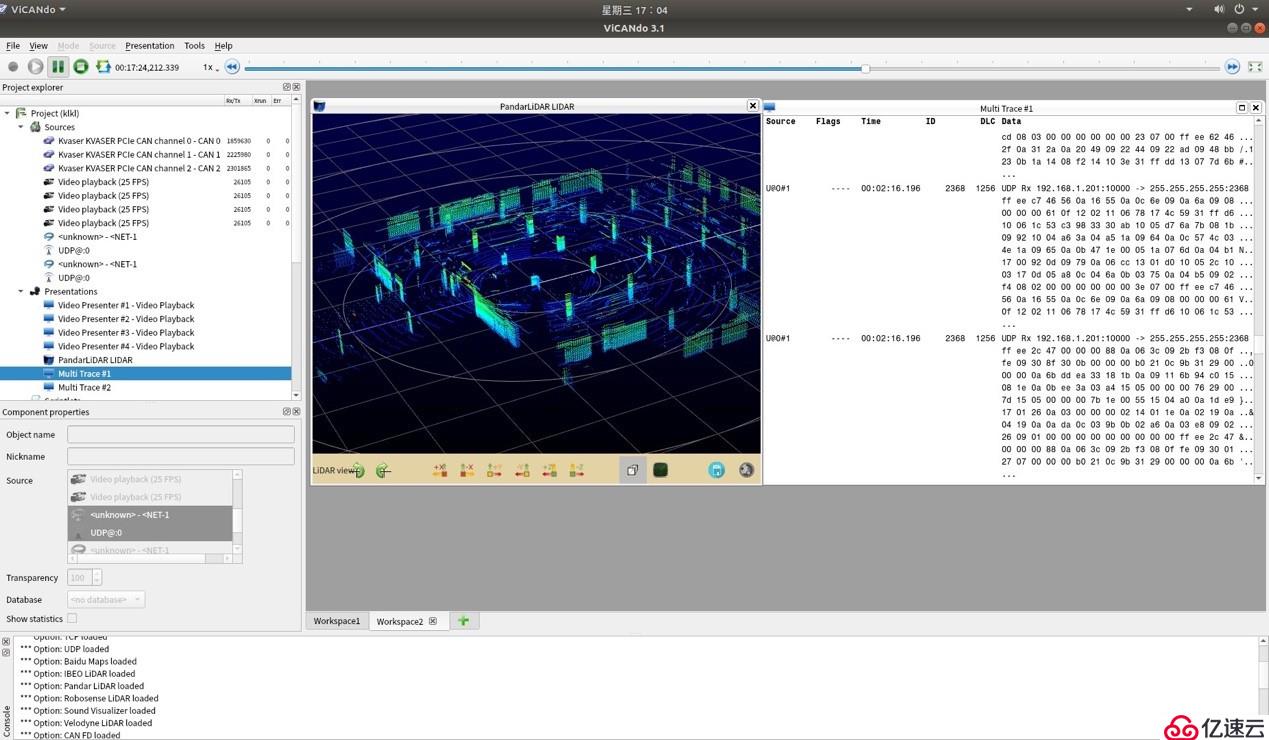
ViCANdo Suite 产品介绍
ViCANdo Suite是针对智能驾驶功能的开发和测试平台软件套装。
软件包含如下组件:

• ViCANdo:
ViCANdo是一款跨平台的,针对AD/ADAS开发的数据记录和分析工具,支持运行在Windows、Linux、MacOS等操作系统,支持X86、ARM等平台。
• ViCANlog:
设计用于车端路试采集的软件,可以运行在任何基于linux的硬件设备上,无人值守采集数据。除了一般计算机外,也支持Nvidia TX-2、Xavier,Nexcom等设备。
• ViCANdroid:
安卓端的APP,可以采集CAN总线和视频、音频、GPS等数据,内建FTP服务,可以自动的上传数据到服务器。便于方便的对数据进行处理分析。
• ViCANsim:
通过与OpenCV和Matlab/Simulink™等的集成,方便用户部署自己的算法在ViCANsim上,于此同时也具有与Matlab/Simulink™的接口。
• ViCANbedded:
ViCANbedded的目标是应用与嵌入式环境,与ViCANdo 相同。它旨在轻松地将源代码从 PC 平台移植到到嵌入式环境。目前,它可支持 QTEmbedded 4.X及更高版本、QNX、Velocity、VxWorks等。

经纬恒润
北京市海淀区知春路7号致真大厦D座6层
电话:010-64840808
邮箱:market_dept@hirain.com
网址:www.hirain.com
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





