这篇“OpenCV停车场车位实时检测项目分析”文章的知识点大部分人都不太理解,所以小编给大家总结了以下内容,内容详细,步骤清晰,具有一定的借鉴价值,希望大家阅读完这篇文章能有所收获,下面我们一起来看看这篇“OpenCV停车场车位实时检测项目分析”文章吧。
今天整理OpenCV入门的第三个实战小项目,前面的两篇文章整理了信用卡数字识别以及文档OCR扫描, 大部分用到的是OpenCV里面的基础图像预处理技术,比如轮廓检测,边缘检测,形态学操作,透视变换等, 而这篇文章的项目呢,不仅需要一些基础的图像预处理,还需要搭建模型进行识别和预测,所以通过这个项目,能把图像预处理以及建模型等一整套流程拉起来,并应用到实际的应用场景,还是非常有意思的。
停车场车位实时检测任务,是拿到停车场的一段视频video,主要完成两件事情:
检测整个停车场当中,当前一共有多少辆车,一共有多少个空余的车位
把空余的停车位标识出来,这样用户停车的时候,就可以直接去空余的停车位处, 为停车节省了很多时间
所以这个项目还是非常有实践应用价值的,用了大约一天半的时间搞定这个项目,参考的是唐老师的OpenCV入门教程视频, 不过这里面对于这个任务做的相对粗糙,我在这个基础上基于我的理解进行了一些优化,主要改动如下:
据处理方面,按列框出停车位之后,我对每一列框的坐标手工进行了调整,确保每个停车位不遗漏,不多余, 然后是对每个停车位的坐标位置进行了微调,尽量让其标记的准一些
模型方面,原视频采用迁移学习方式,基于keras对VGG网络进行的微调,而我模型这里统一基于pytorch,用的ResNet32预训练模型进行的finetune,验证集正确率能到0.94多,但第一版还是有少量预测的不是很准,所以又基于已有的帧图片做了数据增强,额外增加了一些数据,把准确率提升到0.98左右
项目的整体架构全部改变,算是听懂了上面的思想,然后基于自己的理解进行的重构,好处是后面可以进行各种优化,按照自己需求做数据增强,数据预处理以及训练各种高级模型等。
不过,发现小resnet就够强大的了,最终的预测效果如下:

这是视频中的某一帧图像,实际运行的时候,是读入视频,快速分开帧,每一帧做出这样的预测标记,然后实时显示。这样在每个时刻,都能动态的知道该停车场有哪些车位空了出来。
下面就对这个项目中用到的关键技术进行整理,由于这个项目稍微大一些,代码量多,不可能在这里全部展示,但想记录下对于这个项目我的思考过程,以及各种处理的动机,以及如何进行的处理,我觉得这个才是对以后有用的东西。
首先,拿到这个任务之后, 得大致上梳理下流程,才能确定行动方案。 我们开始拿到了这样的一段视频,那么为了完成上面停车位检测以及识别的任务,就需要考虑两步:
我得先把停车场的每个停车位给提取出来
有了每个停车位,我训练一个模型,去预测这个停车位上有没有车就行啦,把没有车的标识出来,然后统计个数
其实宏观上就这么两大步。那么后面的问题就是怎么把每个车位提取出来,又怎么训练模型预测呢?
我这里主要分为了两大步, 数据预处理以及模型的训练及预测:
数据预处理方面
以视频中某一帧的图像为单位,进行处理
通过二值化,灰度化,边缘检测,特定点标定连线等,把图片中多余的部分去掉,只保留停车场内的这部分对象
霍夫变换的直线检测,去找图片中的直线,根据直线坐标,先按列为单位,把车位按列框起来, 然后对框手动微调
在每一列中,锁定每个停车位的位置,并对每个停车位进行标号,把这个保存成字典
有了每个停车位的位置,就能提取出对应图片,可以作为后面模型的训练以及验证的数据集,不过需要人工手动划分
通过上面步骤,会积累一些数据,大约800多张图片,接下来就可以训练模型,但是由于数据量太少,从头训练模型往往效果不好,所以这里采用迁移学习的方式,使用了预训练的resnet34,用这800多张图片微调。
训练好了模型保存,接下来,对于每一帧图像,有了停车位位置字典,就能直接提取出每一个停车位,然后对于这每个停车位,模型预测有没有车即可
所以有了这样的一个流程,就能再进一步分解细化,就可以大处着眼小处着手啦,下面整理每一步里面的关键细节。
首先,把一帧图像读入进来,原始图像如下:

先通过二值化的方式过滤掉背景,突出重要信息,然后转成灰度图。
def select_rgb_white_yellow(image): # 过滤背景 lower = np.uint8([120, 120, 120]) upper = np.uint8([255, 255, 255]) # 三个通道内,低于lower和高于upper的部分分别变成0, 在lower-upper之间的值变成255, 相当于mask,过滤背景 # 保留了像素值在120-255之间的像素值 white_mask = cv2.inRange(image, lower, upper) masked_img = cv2.bitwise_and(image, image, mask=white_mask) return masked_img masked_img = select_rgb_white_yellow(test_image)
这里看到inRange(),想到了之前用到的二值化的方法threshold, 我在想这俩有啥区别? 为啥这里不用这个了? 下面是我经过探索得到的几点使用经验:
cv2.threshold(src, thresh, maxval, type[, dst]):针对的是单通道图像(灰度图), 二值化的标准,type=THRESH_BINARY: if x > thresh, x = maxval, else x = 0, 而type=THRESH_BINARY_INV: 和上面的标准反着,目前常用到了这俩个
cv2.inRange(src, lowerb, upperb):可以是单通道图像,可以是三通道图像,也可以进行二值化,标准是if x >= lower and x <= upper, x = 255, else x = 0
这里做了一个实验, 事先把图片转化成灰度图warped = cv2.cvtColor(test_image, cv2.COLOR_BGR2GRAY),然后下面两句代码的执行结果是一样的:
cv2.threshold(warped, 119, 255, cv2.THRESH_BINARY)[1]
cv2.inRange(warped, 120, 255)
处理之后的图片长这样:

接下来,采用Canny边缘检测算法,检测出边缘来
low_threshold, high_threshold = 50, 200 edges_img = cv2.Canny(gray_img, low_threshold, high_threshold)
结果如下:
下面尝试把停车场这块提取出来, 把其余那些没用的去掉。
这里的思路就是,先用6个标定点把停车场的这几个角给他定住,这个标定点得需要自己找。 找到之后, 采用OpenCV中的填充函数,就能制作一个mask矩阵,然后就能把其余部分去掉了。
def select_region(image):
"""这里手动选择区域"""
rows, cols = image.shape[:2]
# 下面定义6个标定点, 这个点的顺序必须让它化成一个区域,如果调整,可能会交叉起来,所以不要动
pt_1 = [cols*0.06, rows*0.90] # 左下
pt_2 = [cols*0.06, rows*0.70] # 左上
pt_3 = [cols*0.32, rows*0.51] # 中左
pt_4 = [cols*0.6, rows*0.1] # 中右
pt_5 = [cols*0.90, rows*0.1] # 右上
pt_6 = [cols*0.90, rows*0.90] # 右下
vertices = np.array([[pt_1, pt_2, pt_3, pt_4, pt_5, pt_6]], dtype=np.int32)
point_img = image.copy()
point_img = cv2.cvtColor(point_img, cv2.COLOR_GRAY2BGR)
for point in vertices[0]:
cv2.circle(point_img, (point[0], point[1]), 10, (0, 0, 255), 4)
# cv_imshow('points_img', point_img)
# 定义mask矩阵, 只保留点内部的区域
mask = np.zeros_like(image)
if len(mask.shape) == 2:
cv2.fillPoly(mask, vertices, 255) # 点框住的地方填充为白色
#cv_imshow('mask', mask)
roi_image = cv2.bitwise_and(image, mask)
return roi_image
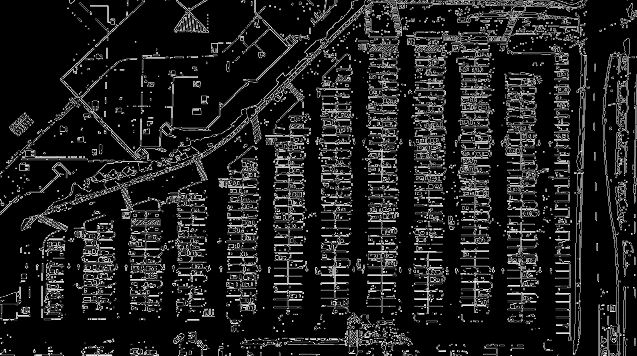
roi_image = select_region(edges_img)处理的效果如下:
这样处理好了,我们就需要找到这里面的直线,然后通过直线去猜测大致的位置。
这里采用霍夫变换检测直线, 函数是cv2.HoughLinesP, 该函数能检测直线的两个端点(x0,y0, x1, y1)。函数原型:
HoughLinesP(image, rho, theta, threshold[, lines[, minLineLength[, maxLineGap]]]) -> lines
image: 边缘检测的输出图像,这里要注意必须是边缘检测的输出图像
rho: 参数极径r以像素值为单位的分辨率,一般1
threa: 以弧度为单位的分辨率,一般1
threshold: 检测一条直线所需最少的曲线交点
minLineLength: 能形成一条直线的最小长度,太短,不认为是一条直线
maxLineGap: 两条直线直接最大间隔,小于这个值,认为是一条直线
所以,这个函数拿来直接用。
def hough_lines(image): # 输入的图像需要是边缘检测后的结果 # minLineLengh(线的最短长度,比这个短的都被忽略)和MaxLineCap(两条直线之间的最大间隔,小于此值,认为是一条直线) # rho距离精度,theta角度精度,threshod超过设定阈值才被检测出线段 return cv2.HoughLinesP(image, rho=0.1, theta=np.pi/10, threshold=15, minLineLength=9, maxLineGap=4) list_of_lines = hough_lines(roi_image) # (2338, 1, 4)
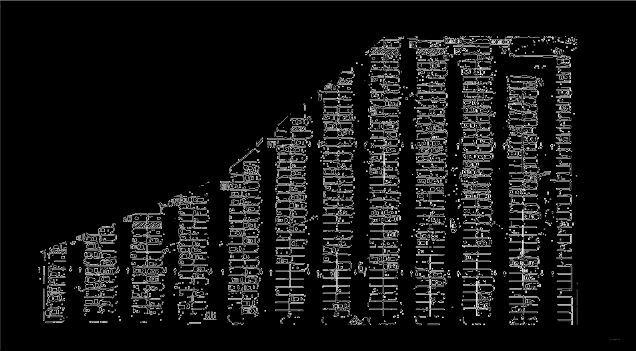
竟然检测到了2338条直线,这里面肯定有很多不能用的,所以后面处理,需要对直线先进行一波筛选。筛选原则是线不能是斜的,且水平方向不能太长或者是太短。 具体代码下面会看到,这里先展示下过滤之后的效果。

过滤完了,总共628条直线。
下面的代码会稍微复杂,所以需要分块讲思路。
首先,我们拿到了停车场的直线以及它的坐标位置。 过滤操作已经做好,接下来,就是对每条直线进行排序。 让这些线,从一列一列的,从上往下依次排列好。
def identity_blocks(image, lines, make_copy=True): if make_copy: new_image = image.copy() # 过滤部分直线 stayed_lines = [] for line in lines: for x1, y1, x2, y2 in line: # 这里是过滤直线,必须保证不能是斜的线,且水平方向不能太长或者太短 if abs(y2-y1) <=1 and abs(x2-x1) >=25 and abs(x2-x1) <= 55: stayed_lines.append((x1,y1,x2,y2)) # 对直线按照x1排序, 这样能让这些线从上到下排列好, 这个排序是从第一列的第一条横线,往下走,然后是第二列第一条横线往下,... list1 = sorted(stayed_lines, key=operator.itemgetter(0, 1))
排列好之后,遍历所有线, 看看相邻两条线之间的距离,如果是一列, 那么两条线的x_1应该离得非常近,毕竟是同一列,如果这个值太大了,说明是下一列了。根据这个准则,遍历完之后,就能把这些线划分到不同的列里面。这里是用了一个字典,键表示列,值表示每一列里面的直线。
代码接上:
# 找到多个列,相当于每列是一排车 clusters = collections.defaultdict(list) dIndex = 0 clus_dist = 10 # 每一列之间的那个距离 for i in range(len(list1) - 1): # 看看相邻两条线之间的距离,如果是一列的,那么x1这个距离应该很近,毕竟是同一列上的 # 如果这个值大于10了,说明是下一列的了,此时需要移动dIndex, 这个表示的是第几列 distance = abs(list1[i+1][0] - list1[i][0]) if distance <= clus_dist: clusters[dIndex].append(list1[i]) clusters[dIndex].append(list1[i+1]) else: dIndex += 1
有了每一列里面的直线,下面就是就是遍历每一列,先拿到所有直线,然后找到纵坐标的最大值和最小值,以及横坐标的最大和最小值,但由于横坐标这里,首尾列都一排车位,中间排都是两列,不好直接取到最大最小坐标,所以这里采用了求平均的方式。 这样遍历完,针对每一列,就能得到左上角点和右下角点,这是一个矩形框。
代码接上:
# 得到每列停车位的矩形框
rects = {}
i = 0
for key in clusters:
all_list = clusters[key]
cleaned = list(set(all_list))
# 有5个停车位至少
if len(cleaned) > 5:
cleaned = sorted(cleaned, key=lambda tup: tup[1])
avg_y1 = cleaned[0][1]
avg_y2 = cleaned[-1][1]
if abs(avg_y2-avg_y1) < 15:
continue
avg_x1 = 0
avg_x2 = 0
for tup in cleaned:
avg_x1 += tup[0]
avg_x2 += tup[2]
avg_x1 = avg_x1 / len(cleaned)
avg_x2 = avg_x2 / len(cleaned)
rects[i] = [avg_x1, avg_y1, avg_x2, avg_y2]
i += 1
print('Num Parking Lanes: ', len(rects))下面,把矩形框画出来:
# 把列矩形画出来 buff = 7 for key in rects: tup_topLeft = (int(rects[key][0] - buff), int(rects[key][1])) tup_botRight = (int(rects[key][2] + buff), int(rects[key][3])) cv2.rectangle(new_image, tup_topLeft, tup_botRight, (0, 255, 0), 3) return new_image, rects
这里的buff,也是进行了一点微调操作。 这种是根据实际场景来的,不是死的。 效果如下:

这样就会发现,对于每一列的停车位,有了大致上的矩形框标定,但是这个非常粗糙。 原视频里面就基于这个往后面走了。 我这里对于每一列框进行微调,因为这个框非常重要。不准的话影响后面的具体车位划分。
def rect_finetune(image, rects, copy_img=True): if copy_img: image_copy = image.copy() # 下面需要对上面的框进行坐标微调, 让框更加准确 # 这个框很重要,影响后面停车位的统计,尽量不能有遗漏 for k in rects: if k == 0: rects[k][1] -= 10 elif k == 1: rects[k][1] -= 10 rects[k][3] -= 10 elif k == 2 or k == 3 or k == 5: rects[k][1] -= 4 rects[k][3] += 13 elif k == 6 or k == 8: rects[k][1] -= 18 rects[k][3] += 12 elif k == 9: rects[k][1] += 10 rects[k][3] += 10 elif k == 10: rects[k][1] += 45 elif k == 11: rects[k][3] += 45 buff = 8 for key in rects: tup_topLeft = (int(rects[key][0]-buff), int(rects[key][1])) tup_botRight = (int(rects[key][2]+buff), int(rects[key][3])) cv2.rectangle(image_copy, tup_topLeft, tup_botRight, (0, 255, 0), 3) return image_copy, rects
微调之后的效果如下:

原则就是不遗漏,不多余。
这里就是针对每个矩形框, 对里面的停车位用直线切割成一个个的,每个停车位用(x1,y1,x2,y2)标识,左上角和右下角的坐标。并进行标号,最终形成一个字典,字典的键就是位置,值就是序号。当然,这里的一个细节,依然是中间排是两排,首尾是一排,这个在具体划分停车位的时候,一定要注意。
def draw_parking(image, rects, make_copy=True, save=True):
gap = 15.5
spot_dict = {} # 一个车位对应一个位置
tot_spots = 0
#微调
adj_x1 = {0: -8, 1:-15, 2:-15, 3:-15, 4:-15, 5:-15, 6:-15, 7:-15, 8:-10, 9:-10, 10:-10, 11:0}
adj_x2 = {0: 0, 1: 15, 2:15, 3:15, 4:15, 5:15, 6:15, 7:15, 8:10, 9:10, 10:10, 11:0}
fine_tune_y = {0: 4, 1: -2, 2: 3, 3: 1, 4: -3, 5: 1, 6: 5, 7: -3, 8: 0, 9: 5, 10: 4, 11: 0}
for key in rects:
tup = rects[key]
x1 = int(tup[0] + adj_x1[key])
x2 = int(tup[2] + adj_x2[key])
y1 = int(tup[1])
y2 = int(tup[3])
cv2.rectangle(new_image, (x1, y1),(x2,y2),(0,255,0),2)
num_splits = int(abs(y2-y1)//gap)
for i in range(0, num_splits+1):
y = int(y1+i*gap) + fine_tune_y[key]
cv2.line(new_image, (x1, y), (x2, y), (255, 0, 0), 2)
if key > 0 and key < len(rects) - 1:
# 竖直线
x = int((x1+x2) / 2)
cv2.line(new_image, (x, y), (x, y2), (0, 0, 255), 2)
# 计算数量 除了第一列和最后一列,中间的都是两列的
if key == 0 or key == len(rects) - 1:
tot_spots += num_splits + 1
else:
tot_spots += 2 * (num_splits + 1)
# 字典对应好
if key == 0 or key == len(rects) - 1:
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i * gap) + fine_tune_y[key]
spot_dict[(x1, y, x2, y+gap)] = cur_len + 1
else:
for i in range(0, num_splits+1):
cur_len = len(spot_dict)
y = int(y1 + i * gap) + fine_tune_y[key]
x = int((x1+x2) / 2)
spot_dict[(x1, y, x, y+gap)] = cur_len + 1
spot_dict[(x, y, x2, y+gap)] = cur_len + 2
return new_image, spot_dict这里的fine_tune_y也是我后来加上去的,也是为了让每一列尽量把车位划分的准确些。

从这个效果上来看,基本上就把车位一个个的划分开了,划分开之后,会发现,这里面有些并不是车位, 但依然给框住了。这样统计个数的时候,以及后面给信息停车的时候会受到影响,所以我这里又一一排查,去掉了这些无效的车位。
# 去掉多余的停车位
invalid_spots = [10, 11, 33, 34, 37, 38, 61, 62, 93, 94, 95, 97, 98, 135, 137, 138, 187, 249,
250, 253, 254, 323, 324, 327, 328, 467, 468, 531, 532]
valid_spots_dict = {}
cur_idx = 1
for k, v in spot_dict.items():
if v in invalid_spots:
continue
valid_spots_dict[k] = cur_idx
cur_idx += 1这样,还可以把处理好的车位信息进行可视化,再进行微调,不过,我这里由于之前的一些微调操作,感觉效果还可以,就没有做任何调整啦。
# 把每一个有效停车位标记出来
tmp_img = test_image.copy()
for k, v in valid_spots_dict.items():
cv2.rectangle(tmp_img, (int(k[0]), int(k[1])),(int(k[2]),int(k[3])), (0,255,0) , 2)
cv_imshow('valid_pot', tmp_img)效果如下:

如果要想让后面模型对于每个车位预测的更加准确,这里的划分一定要尽量的细致和标准。 否则如果矩形框和真实的车位对应不上,比如矩形框卡在了两个车位中间这种,这样划分出的车位拿给模型看,就很容易判断出错。
另外,最终的这个字典很重要,因为这个字典里面保存的是各个车位的位置信息。 有了这个东西,拿到一帧图片,就可以直接把每个车位标定出来,拿给模型预测。 并且对于同一停车场,这个每个车位是固定的。所以这个也不会变,视频的所有图像共用。 这样能保证实时性。
有了各个车位的具体位置信息,下面直接按照这里面的左边把每个车位切割出来,就能得到后面CNN的训练和验证的数据集了。
def save_images_for_cnn(image, spot_dict, folder_name = '../cnn_pred_data'):
for spot in spot_dict.keys():
(x1, y1, x2, y2) = spot
(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))
# 裁剪
spot_img = image[y1:y2, x1:x2]
spot_img = cv2.resize(spot_img, (0, 0), fx=2.0, fy=2.0)
spot_id = spot_dict[spot]
filename = 'spot_{}.jpg'.format(str(spot_id))
# print(spot_img.shape, filename, (x1,x2,y1,y2))
cv2.imwrite(os.path.join(folder_name, filename), spot_img)
save_images_for_cnn(test_image, valid_spots_dict)这样,就把模型的训练数据集准备好。 在文件中组织成这个样子:
每个目录里面,就是划分出来的一张张小的车位图像,不过这里是人为划分到了有车还是无车里面。所以后面的模型其实做一个二分类任务,给定这样一张车位的小图像,预测下是不是空的即可。
下面开始说模型的细节。
由于目前的样本非常少,不足以训练一个大模型到收敛,所以这里采用的迁移学习技术,用的预训练模型。
模型这里和视频中不一样的是,我统一采用pytorch写的模型训练和测试代码,原因是最近正在尝试pytorch复现cv里面的各个经典网络,这个项目正好让我拿来练手。另外一个就是感觉keras搭建的灵活度不够,在数据预处理方面不如torchvision里面transforms用起来方便。 基于这两个原因, 我这里直接用pytorch,采用的resnet34预训练模型,使用这个的原因是这两天正好把resnet复现了一遍,稍微熟悉了一点罢了,正好能学以致用,没有啥偏爱。
由于这里的代码非常多,这里就不过多罗列了,简单说下逻辑即可,感兴趣的可以看具体项目。
首先是训练模型。
这个整体逻辑倒是可以看下:
def train_model(): # 获取dataloader data_root = os.getcwd() image_path = os.path.join(data_root, "train_data") train_data_path = os.path.join(image_path, "train") val_data_path = os.path.join(image_path, "test") train_loader, validat_loader, train_num, val_num = get_dataloader(train_data_path, val_data_path, data_transform_pretrain, batch_size=8) # 创建模型 注意这里没指定类的个数,默认是1000类 net = resnet34() model_weight_path = 'saved_model_weight/resnet34_pretrain_ori_low_torch_version.pth' # 使用预训练的参数,然后进行finetune net.load_state_dict(torch.load(model_weight_path, map_location='cpu')) # 改变fc layer structure 把fc的输出维度改为2 in_channel = net.fc.in_features net.fc = nn.Linear(in_channel, 2) net.to(device) # 模型训练配置 loss_function = nn.CrossEntropyLoss() optimizer = optim.Adam(net.parameters(), lr=0.0001) epochs = 30 save_path = "saved_model_weight/resnet34_pretrain.pth" best_acc = 0. train_steps = len(train_loader) model_train(net, train_loader, validat_loader, epochs, device, optimizer, loss_function, train_steps, val_num, save_path, best_acc)
因为我这里采用了一些函数封装,所以这个逻辑应该稍微清晰些,首先pytorch模型训练,要先把数据封装成dataloader的格式,后面模型训练的时候,是从这个类里面读取数据。关于dataloader与dataset的原理这里就不过多整理。之前我详细在pytorch基础那里整理过了。
不过这里的细节,就是data_transform_pretrain, 也就是数据预处理操作。
data_transform_pretrain = {
"train": transforms.Compose([
transforms.RandomResizedCrop(224), # 对图像随机裁剪, 训练集用,验证集不用
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
# 这里的中心化处理参数需要官方给定的参数,这里是ImageNet图片的各个通道的均值和方差,不能随意指定了
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
]),
"val": transforms.Compose([
# 验证过程中,这里也进行了一点点改动
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
]),
"test": transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
])
}这里由于是采用的官方训练好的resnet网络,我们这里中心化要参考官方给定的参数,因为它预训练是ImageNet这个大数据集上训练的,所以这里每个通道的均值和方差,我们最好别随意指定。用人家官方给出的。
有了dataloader,接下来创建模型, 这里是直接使用的resnet34, 把预训练的模型参数导入进来。导入的时候,会发现我这个参数名字的文件有个low_torch_version, 是因为之前导入的时候出现了报错:
xxx.pt is a zip archive(did you mean to use torch.jit.load()?)“
这个报错的原因是,官方预训练保存的模型参数使用的pytorch版本是1.6以上,PyTorch的1.6版本将torch.save切换为使用新的基于zipfile的文件格式。
torch.load仍然保留以旧格式加载文件的功能。 如果希望torch.save使用旧格式,请传递kwarg _use_new_zipfile_serialization = False。
我电脑本子的pytorch版本是1.0,所以导入1.6以上版本保存的模型参数,就会报这样的错误。 那么,我怎么解决的呢? 那就是从我服务器上,运行了下面这个代码
model_weight_path = "saved_models/resnet34_pretrain_ori.pth" state_dict = torch.load(model_weight_path) torch.save(state_dict, 'saved_models/resnet34_pretrain_ori_low_torch_version.pth', _use_new_zipfile_serialization=False)
我服务器上的pytorch版本是1.10的版本,是能导入这个参数的,导入完了重新保存,指定官方给定的参数即可。
这个问题解决之后,下面就说下预训练模型了, 导入参数之后,我们需要修改网络最后的一层,因为resnet本身做的是1000分类,最后一层神经元个数是1000,我们这里需要做二分类,所以需要改成2。
另外,就是迁移学习的三种方式:
载入权重后重新训练所有参数 – 硬件设施好
载入权重后只训练最后几层参数,前面的层进行冻结, 或者是前面几层的学习率降低, 后面全连接层的学习率变大,即分组调整学习率
载入全中后在原网络基础上再添加一层全连接层, 仅训练最后一个全连接层
我这里采用的全部训练的方式,但是这里有必要整理下,如果是想只训练后面几层,或者前面层和后面层不同学习率训练的时候,应该怎么做:
# 创建模型 注意这里没指定类的个数,默认是1000类
net = resnet34()
model_weight_path = 'saved_model_weight/resnet34_pretrain_ori_low_torch_version.pth'
# 使用预训练的参数,然后进行finetune
net.load_state_dict(torch.load(model_weight_path, map_location='cpu'))
# 改变fc layer structure 把fc的输出维度改为2
in_channel = net.fc.in_features
net.fc = nn.Linear(in_channel, 2)
net.to(device)
# 模型训练配置
loss_function = nn.CrossEntropyLoss()
# 训练的时候,也可以冻结掉卷积层的参数, 也可以指定不同层的参数使用不同的学习率进行训练
res_params, conv_params, fc_params = [], [], []
# named_parameters()能返回每一层的名字以及参数,是一个字典
for name, param in net.named_parameters():
# layer 系列是残差层
if ('layer' in name):
res_params.append(param)
# 全连接层
elif ('fc' in name):
fc_params.append(param)
else:
param.requires_grad = False
params = [
{'params': res_params, 'lr': 0.0001},
{'params': fc_params, 'lr': 0.0002},
]
optimizer = optim.Adam(params)这里修改优化器的参数即可。
这样完事之后,调用模型训练的函数,直接进行训练即可。这个脚本就是常规操作了,这里就不贴代码了。
有了保存好的模型, 我们拿来一帧图像,根据停车位字典划分出一个个的停车位来,然后通过模型预测是不是空的,如果是空的, 在原图上进行标记出来即可。
所以下面是整个项目的核心预测:
def predict_on_img(img, spot_dict, model, class_indict, make_copy=True, color=[0, 255, 0], alpha=0.5, save=True):
# 这个是停车场的全景图像
if make_copy:
new_image = np.copy(img)
overlay = np.copy(img)
cnt_empty, all_spots = 0, 0
for spot in tqdm(spot_dict.keys()):
all_spots += 1
(x1, y1, x2, y2) = spot
(x1, y1, x2, y2) = (int(x1), int(y1), int(x2), int(y2))
spot_img = img[y1:y2, x1:x2]
spot_img_pil = Image.fromarray(spot_img)
label = model_infer(spot_img_pil, model, class_indict)
if label == 'empty':
cv2.rectangle(overlay, (int(x1), int(y1)), (int(x2), int(y2)), color, -1)
cnt_empty += 1
cv2.addWeighted(overlay, alpha, new_image, 1 - alpha, 0, new_image)
# 显示结果的
cv2.putText(new_image, "Available: %d spots" % cnt_empty, (30, 95),
cv2.FONT_HERSHEY_SIMPLEX,
0.7, (255, 255, 255), 2)
cv2.putText(new_image, "Total: %d spots" % all_spots, (30, 125),
cv2.FONT_HERSHEY_SIMPLEX,
0.7, (255, 255, 255), 2)
if save:
filename = 'with_marking_predict.jpg'
cv2.imwrite(filename, new_image)
# cv_imshow('new_image', new_image)
return new_image模型预测的核心,就是model_infer函数,这个也是模型预测的常规操作,这里不过多解释了。
视频的话,无非就是多帧图像,对于每一帧过一下这个函数,就能进行视频的实时预测:
def predict_on_video(video_path, spot_dict, model, class_indict, ret=True):
cap = cv2.VideoCapture(video_path)
count = 0
while ret:
ret, image = cap.read()
count += 1
if count == 5:
count = 0
new_image = predict_on_img(image, spot_dict, model, class_indict, save=False)
cv2.imshow('frame', new_image)
if cv2.waitKey(10) & 0xFF == ord('q'):
break
cv2.destroyAllWindows()
cap.release()以上就是关于“OpenCV停车场车位实时检测项目分析”这篇文章的内容,相信大家都有了一定的了解,希望小编分享的内容对大家有帮助,若想了解更多相关的知识内容,请关注亿速云行业资讯频道。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





