OpenCVдёӯйңҚеӨ«еҸҳжҚўзӣҙзәҝжЈҖжөӢзҡ„зӨәдҫӢеҲҶжһҗ
иҝҷзҜҮж–Үз« е°ҶдёәеӨ§е®¶иҜҰз»Ҷи®Іи§Јжңүе…іOpenCVдёӯйңҚеӨ«еҸҳжҚўзӣҙзәҝжЈҖжөӢзҡ„зӨәдҫӢеҲҶжһҗпјҢе°Ҹзј–и§үеҫ—жҢәе®һз”Ёзҡ„пјҢеӣ жӯӨеҲҶдә«з»ҷеӨ§е®¶еҒҡдёӘеҸӮиҖғпјҢеёҢжңӣеӨ§е®¶йҳ…иҜ»е®ҢиҝҷзҜҮж–Үз« еҗҺеҸҜд»ҘжңүжүҖ收иҺ·гҖӮ
йңҚеӨ«еҸҳжҚў(Hough Transform)зҡ„дё»иҰҒжҖқжғіпјҡ
дёҖжқЎзӣҙзәҝеңЁе№ійқўзӣҙи§’еқҗж Үзі»(x-y)дёӯеҸҜд»Ҙз”Ёy=ax+bејҸиЎЁзӨәпјҢеҜ№дәҺзӣҙзәҝдёҠдёҖдёӘзЎ®е®ҡзҡ„зӮ№(x0,y0)пјҢжҖ»з¬ҰеҗҲy0-ax0=bпјҢиҖҢе®ғеҸҜд»ҘиЎЁзӨәдёәеҸӮж•°е№ійқўеқҗж Үзі»(a-b)дёӯзҡ„дёҖжқЎзӣҙзәҝгҖӮеӣ жӯӨпјҢеӣҫеғҸдёӯзҡ„дёҖдёӘзӮ№еҜ№еә”еҸӮж•°е№ійқўзҡ„дёҖжқЎзӣҙзәҝпјҢеҗҢж ·пјҢеӣҫеғҸдёӯзҡ„дёҖжқЎзӣҙзәҝеҜ№еә”еҸӮж•°е№ійқўдёҠзҡ„дёҖдёӘзӮ№гҖӮ
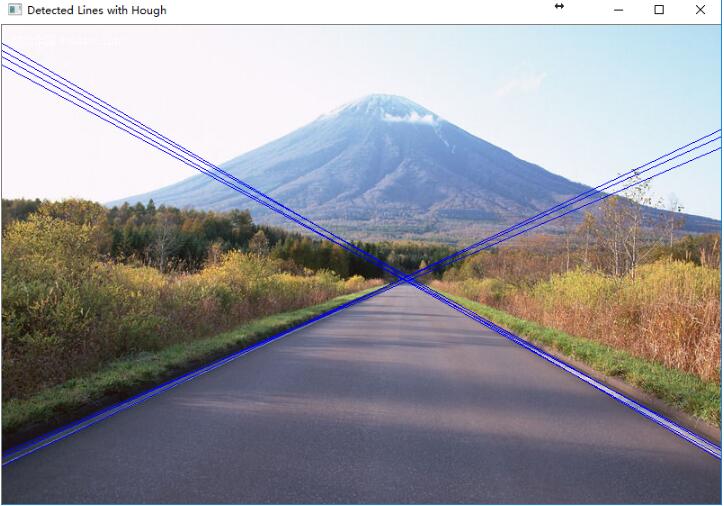
еҹәжң¬HoughеҸҳжҚўжЈҖжөӢзӣҙзәҝпјҡ
з”ұдәҺеҗҢдёҖжқЎзӣҙзәҝдёҠзҡ„дёҚеҗҢзӮ№еңЁеҸӮж•°е№ійқўдёӯжҳҜдјҡз»ҸиҝҮеҗҢдёҖдёӘзӮ№зҡ„еӨҡжқЎзәҝгҖӮеҜ№еӣҫеғҸзҡ„жүҖжңүзӮ№дҪңйңҚеӨ«еҸҳжҚўпјҢжЈҖжөӢзӣҙзәҝе°ұж„Ҹе‘ізқҖжүҫеҲ°еҜ№еә”еҸӮж•°е№ійқўдёӯзҡ„зӣҙзәҝзӣёдәӨжңҖеӨҡзҡ„зӮ№гҖӮеҜ№иҝҷдәӣдәӨзӮ№еҒҡзҘЁж•°зҙҜи®ЎпјҢ然еҗҺеҸ–еҮәзҘЁж•°еӨ§дәҺжңҖе°ҸжҠ•зҘЁж•°зҡ„зӮ№пјҢеҚідёәеҺҹеқҗж Үзі»йҮҢжЈҖжөӢеҮәзҡ„зӣҙзәҝгҖӮ
дёҖиҲ¬пјҢзӣҙзәҝзҡ„еҸӮж•°ж–№зЁӢдёә ПҒ=xcosОё+ysinОё
OpenCVдёӯзҡ„еҹәжң¬йңҚеӨ«еҸҳжҚўзӣҙзәҝжЈҖжөӢеҮҪж•° cv::HoughLinesпјҡ
еҮҪж•°иҫ“е…ҘдёәдёҖе№…дәҢеҖјеӣҫеғҸпјҲжңүеҫҲеӨҡеҫ…жЈҖжөӢзӮ№пјүпјҢе…¶дёӯдёҖдәӣзӮ№жҺ’еҲ—еҗҺеҪўжҲҗзӣҙзәҝпјҢйҖҡеёёиҝҷжҳҜдёҖе№…иҫ№зјҳеӣҫеғҸпјҢжҜ”еҰӮжқҘиҮӘSobelз®—еӯҗжҲ–Cannyз®—еӯҗгҖӮеҮҪж•°зҡ„иҫ“еҮәжҳҜcv::Vec2fзҡ„еҗ‘йҮҸпјҢжҜҸдёӘе…ғзҙ йғҪжҳҜдёҖеҜ№д»ЈиЎЁжЈҖжөӢеҲ°зҡ„зӣҙзәҝзҡ„жө®зӮ№ж•°(ПҒ, Оё)гҖӮеҮҪж•°зҡ„дҪңжі•жҳҜе…ҲжұӮеҮәеҺҹеӣҫеғҸдёӯжҜҸзӮ№зҡ„жһҒеқҗж Үж–№зЁӢпјҢиӢҘзӣёдәӨдәҺдёҖзӮ№зҡ„жһҒеқҗж ҮжӣІзәҝзҡ„дёӘж•°еӨ§дәҺжңҖе°ҸжҠ•зҘЁж•°пјҢеҲҷе°ҶиҜҘзӮ№(ПҒ, Оё)пјҲеҸӮж•°еқҗж Үзі»зӮ№пјүж”ҫе…Ҙиҫ“еҮәеҗ‘йҮҸгҖӮ
#include "opencv2/highgui.hpp"
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
#define PI 3.1415926
class LineFinder{
private:
std::vector<cv::Vec2f> lines;
double deltaRho; // еҸӮж•°еқҗж Үзі»зҡ„жӯҘй•ҝ(thetaиЎЁзӨәдёҺзӣҙзәҝеһӮзӣҙзҡ„и§’еәҰ)
double deltaTheta;
int minVote; // еҲӨж–ӯжҳҜзӣҙзәҝзҡ„жңҖе°ҸжҠ•зҘЁж•°
public:
LineFinder() {
deltaRho = 1;
deltaTheta = PI / 180;
minVote = 80;
}
void setAccResolution(double dRho, double dTheta) {
deltaRho = dRho;
deltaTheta = dTheta;
}
void setMinVote(int minv) {
minVote = minv;
}
// HoughеҸҳжҚўжЈҖжөӢзӣҙзәҝ;rho=1,theta=PI/180еҸӮж•°еқҗж Үзі»йҮҢзҡ„жӯҘй•ҝ,threshold=жңҖе°ҸжҠ•зҘЁж•°
void findLines(cv::Mat& binary){
lines.clear();
cv::HoughLines(binary, lines, deltaRho, deltaTheta, minVote);
}
void drawDetectedLines(cv::Mat& result){
std::vector<cv::Vec2f>::const_iterator it = lines.begin();
while (it != lines.end())
{
// д»ҘдёӢдёӨдёӘеҸӮж•°з”ЁжқҘжЈҖжөӢзӣҙзәҝеұһдәҺеһӮзӣҙзәҝиҝҳжҳҜж°ҙе№ізәҝ
float rho = (*it)[0];
float theta = (*it)[1];
if (theta < PI / 4. || theta > 3.*PI / 4.)
{ // иӢҘжЈҖжөӢдёәеһӮзӣҙзәҝ,зӣҙзәҝдәӨдәҺеӣҫзүҮзҡ„дёҠдёӢдёӨиҫ№,е…ҲжүҫдәӨзӮ№
cv::Point pt1(rho / cos(theta), 0);
cv::Point pt2((rho - result.rows*sin(theta)) / cos(theta), result.rows);
cv::line(result, pt1, pt2, cv::Scalar(255), 1); //
}
else // иӢҘжЈҖжөӢдёәж°ҙе№ізәҝ,зӣҙзәҝдәӨдәҺеӣҫзүҮзҡ„е·ҰеҸідёӨиҫ№,е…ҲжүҫдәӨзӮ№
{
cv::Point pt1(0, rho / sin(theta));
cv::Point pt2(result.cols, (rho - result.cols*cos(theta)) / sin(theta));
cv::line(result, pt1, pt2, cv::Scalar(255), 1);
}
++it;
}
}
};
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread("D:/VS_exercise/images/road1.jpg");
cv::Mat imageGray;
cv::Mat contours;
cv::cvtColor(image, imageGray, cv::COLOR_RGB2GRAY);
cv::Canny(imageGray, contours, 190, 300);
// еңЁеҺҹеӣҫзҡ„жӢ·иҙқдёҠз”»зӣҙзәҝ
cv::Mat result(contours.rows, contours.cols, CV_8U, cv::Scalar(255));
image.copyTo(result);
// HoughеҸҳжҚўжЈҖжөӢ
LineFinder finder;
finder.setMinVote(130);
finder.findLines(contours);
finder.drawDetectedLines(result);
// жҳҫзӨә
cv::namedWindow("Detected Lines with Hough");
cv::imshow("Detected Lines with Hough", result);
cv::waitKey(0);
return 0;
}
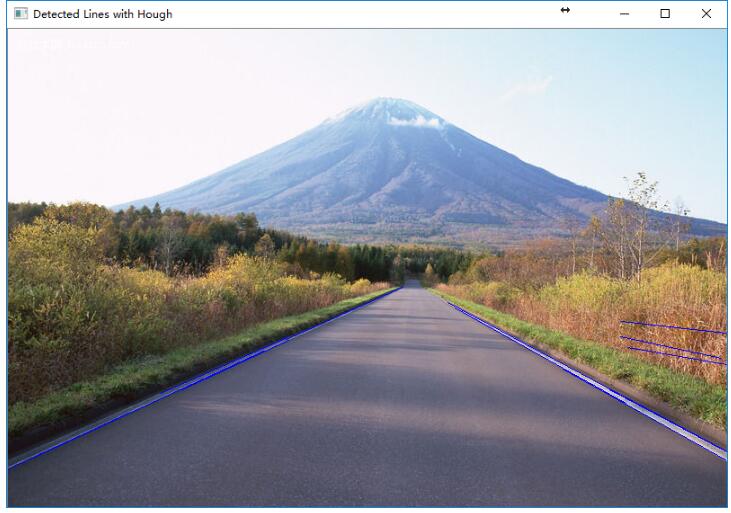
жҰӮзҺҮHoughеҸҳжҚўжЈҖжөӢзәҝж®өпјҡ
йңҚеӨ«еҸҳжҚўжЈҖжөӢзӣҙзәҝзҡ„зӣ®зҡ„пјҢжҳҜжүҫеҲ°дәҢеҖјеӣҫеғҸдёӯз»ҸиҝҮи¶іеӨҹеӨҡж•°йҮҸзӮ№зҡ„жүҖжңүзӣҙзәҝпјҢеҪ“еҗҢдёҖзӣҙзәҝз©ҝиҝҮи®ёеӨҡзӮ№пјҢдҫҝж„Ҹе‘ізқҖиҝҷжқЎзәҝзҡ„еӯҳеңЁи¶іеӨҹжҳҺжҳҫгҖӮ
жҰӮзҺҮйңҚеӨ«еҸҳжҚўеңЁеҺҹз®—жі•зҡ„еҹәзЎҖдёҠеўһеҠ дәҶдёҖдәӣж”№еҠЁпјҢдё»иҰҒжҳҜпјҡ
1. дёҚеҶҚзі»з»ҹең°йҖҗиЎҢжү«жҸҸеӣҫеғҸпјҢиҖҢжҳҜйҡҸжңәжҢ‘йҖүпјҲиҪ®е»“еӣҫеғҸзҡ„пјүеүҚжҷҜзӮ№пјҢдёҖж—ҰзҙҜеҠ еҷЁдёӯзҡ„жҹҗдёҖйЎ№дәӨзӮ№зҡ„зҘЁж•°иҫҫеҲ°з»ҷе®ҡзҡ„жңҖе°ҸеҖјпјҢе°ұжҗңзҙўиҪ®е»“еӣҫеғҸеңЁеҜ№еә”зӣҙзәҝдёҠзҡ„еүҚжҷҜзӮ№пјҢиҝһжҲҗзәҝж®өпјҲиҰҒе°ҸдәҺmaxLineGapпјүпјҢ然еҗҺи®°еҪ•зәҝж®өеҸӮж•°пјҲиө·з»ҲзӮ№пјүпјҢжңҖеҗҺеҲ йҷӨжүҖжңүз»ҸиҝҮзҡ„зӮ№пјҲеҚідҪҝе®ғ们并жңӘжҠ•иҝҮзҘЁпјүгҖӮ
2. жҰӮзҺҮйңҚеӨ«еҸҳжҚўе®ҡд№үдәҶдёӨдёӘйўқеӨ–зҡ„еҸӮж•°пјҡдёҖдёӘжҳҜеҸҜд»ҘжҺҘеҸ—зҡ„жңҖе°Ҹзәҝж®өй•ҝеәҰпјҲminLineLengthпјүпјҢеҸҰдёҖдёӘжҳҜе…Ғи®ёз»„жҲҗиҝһз»ӯзәҝж®өзҡ„жңҖеӨ§еғҸзҙ й—ҙйҡ”пјҲmaxLineGapпјүпјҢиҷҪ然йўқеӨ–жӯҘйӘӨеўһеҠ дәҶз®—жі•зҡ„еӨҚжқӮеәҰпјҢдҪҶз”ұдәҺеҸӮдёҺжҠ•зҘЁзҡ„зӮ№ж•°жңүжүҖеҮҸе°‘пјҢеӣ жӯӨеҫ—еҲ°дәҶдёҖдәӣиЎҘеҒҝгҖӮ
openCVдёӯзҡ„жҰӮзҺҮйңҚеӨ«еҸҳжҚўзӣҙзәҝжЈҖжөӢеҮҪж•° cv::HoughLinesPпјҡ
еҮҪж•°зҡ„иҫ“еҮәжҳҜcv::Vec4iз»„жҲҗзҡ„еҗ‘йҮҸпјҢжҜҸдёӘе…ғзҙ жҳҜжЈҖжөӢеҲ°зҡ„зәҝж®өзҡ„дёӨдёӘеқҗж ҮзӮ№(pt1x, pt1y, pt2x, pt2y)гҖӮ
#include "opencv2/highgui.hpp"
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#define PI 3.1415926
class LineFinder{
private:
std::vector<cv::Vec4i> lines;
double deltaRho; // жӯҘй•ҝ(thetaиЎЁзӨәдёҺзӣҙзәҝеһӮзӣҙзҡ„и§’еәҰ)
double deltaTheta;
int minVote; // еҲӨж–ӯжҳҜзӣҙзәҝзҡ„жңҖе°ҸжҠ•зҘЁж•°
double minLength; // еҲӨж–ӯжҳҜзӣҙзәҝзҡ„жңҖе°Ҹзәҝж®өй•ҝеәҰ
double maxGap; // е…Ғи®ёз»„жҲҗиҝһз»ӯзәҝж®өзҡ„жңҖеӨ§еғҸзҙ й—ҙйҡ”
public:
LineFinder() {
deltaRho = 1;
deltaTheta = PI / 180;
minVote = 10;
minLength = 0.0;
maxGap = 0.0;
}
void setAccResolution(double dRho, double dTheta) {
deltaRho = dRho;
deltaTheta = dTheta;
}
void setMinVote(int minv) {
minVote = minv;
}
void setLineLengthAndGap(double length, double gap) {
minLength = length;
maxGap = gap;
}
// HoughеҸҳжҚўжЈҖжөӢзәҝж®ө
void findLines(cv::Mat& binary) {
lines.clear();
cv::HoughLinesP(binary, lines, deltaRho, deltaTheta, minVote, minLength, maxGap);
}
void drawDetectedLines(cv::Mat &image, cv::Scalar color = cv::Scalar(255)) {
std::vector<cv::Vec4i>::const_iterator it2 = lines.begin();
while (it2 != lines.end()) {
cv::Point pt1((*it2)[0], (*it2)[1]);
cv::Point pt2((*it2)[2], (*it2)[3]);
cv::line(image, pt1, pt2, color, 1.5); //з”»зәҝж®ө
++it2;
}
}
};
int main(int argc, char *argv[])
{
cv::Mat image = cv::imread("D:/VS_exercise/images/road1.jpg");
cv::Mat imageGray;
cv::Mat contours;
cv::cvtColor(image, imageGray, cv::COLOR_RGB2GRAY);
// иҫ№зјҳжЈҖжөӢ
cv::Canny(imageGray, contours, 190, 300);
// HoughеҸҳжҚўжЈҖжөӢ
LineFinder finder;
finder.setMinVote(80);
finder.setLineLengthAndGap(100, 10); //жҰӮзҺҮHoughеҸҳжҚўеўһеҠ зҡ„дёӨдёӘеҸӮж•°
finder.findLines(contours);
finder.drawDetectedLines(image);
// жҳҫзӨә
cv::imshow("Detected Lines with Hough", image);
cv::waitKey(0);
return 0;
}
е…ідәҺвҖңOpenCVдёӯйңҚеӨ«еҸҳжҚўзӣҙзәҝжЈҖжөӢзҡ„зӨәдҫӢеҲҶжһҗвҖқиҝҷзҜҮж–Үз« е°ұеҲҶдә«еҲ°иҝҷйҮҢдәҶпјҢеёҢжңӣд»ҘдёҠеҶ…е®№еҸҜд»ҘеҜ№еӨ§е®¶жңүдёҖе®ҡзҡ„её®еҠ©пјҢдҪҝеҗ„дҪҚеҸҜд»ҘеӯҰеҲ°жӣҙеӨҡзҹҘиҜҶпјҢеҰӮжһңи§үеҫ—ж–Үз« дёҚй”ҷпјҢиҜ·жҠҠе®ғеҲҶдә«еҮәеҺ»и®©жӣҙеӨҡзҡ„дәәзңӢеҲ°гҖӮ





