本篇内容介绍了“Micropython如何DIY蓝牙智能小车”的有关知识,在实际案例的操作过程中,不少人都会遇到这样的困境,接下来就让小编带领大家学习一下如何处理这些情况吧!希望大家仔细阅读,能够学有所成!
1.实验目的
1.学习在PC机系统中扩展简单I/O接口的方法。
2.进一步学习编制数据输出程序的设计方法。
3.学习蓝牙模块的接线方法及其工作原理。
4.学习L298N电机驱动板模块的接线方法。
5.学习蓝牙控制小车的工作原理。
2.所需元器件
TPYBoard板子一块
蓝牙串口模块一个
L298N电机驱动板模块一个
智能小车底盘一个
数据线一条
杜邦线若干
3.蓝牙串口模块原理
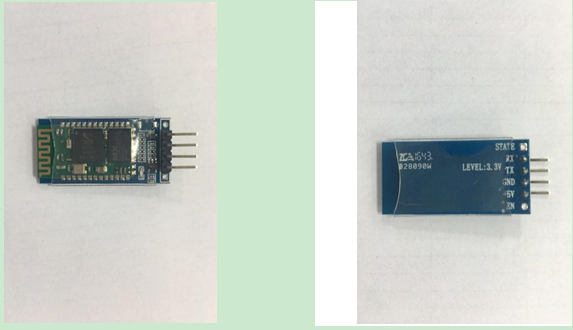
(1)引出接口包括EN,5V,GND,TX,RX,STATE,我们小车只用到RX,TX,GND,5V四个针脚。
(2)模块默认波特率位9600,默认配对密码为1234,默认名称位为HC-06。
(3)led指示蓝牙连接状态,闪烁表示没有蓝牙连接,常亮表示蓝牙已连接并打开了端口,当我们用安卓手机软件发送指令时,通过串口给TPYBoard发送指令,TPYBoard收到指令通过L298BN模块来驱动小车前进,后退,向左,向右或者停止。
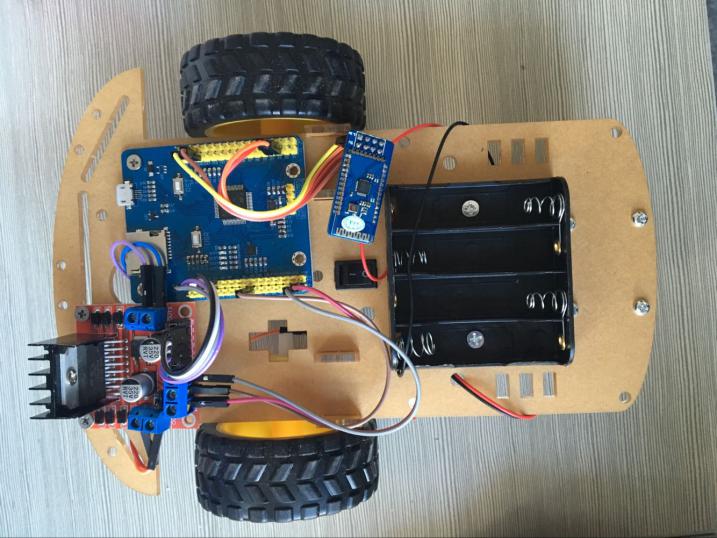
如下图接线,5V接TPYBoard的VIN,GND为地线,TX接TPYBoard的RX(这用的是TPYBoard串口2,X3,X4)即X4,RX接TPYBoard的TX即X3。
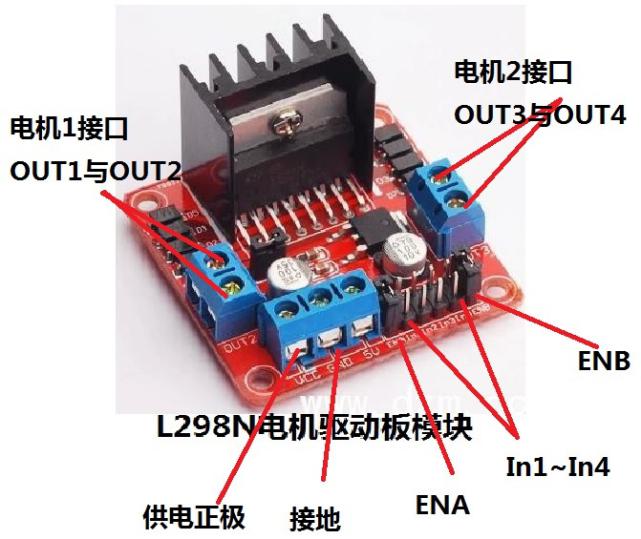
4.学习L298N电机驱动板模块的接线方法
本模块是2路的H桥驱动,所以可以同时驱动两个电机,接法如图所示使能ENAENB之后,可以分别从IN1IN2输入PWM信号驱动电机1的转速和方向,可以分别从IN3IN4输入PWM信号驱动电机2的转速和方向。我们将电机1接口的OUT1与OUT2与小车的一个电机的正负极连接起来,将电机2接口的OUT3与OUT2与小车的另一个电机的正负极连接起来。然后将两边的接线端子,即供电正极(中间的接线端子为接地)连接TPYboard的VIN,中间的接线端子即接地,连接TPYBoard的GND,In1-In4连接TPYBoard的Y1,Y2,Y3,Y4,通过Y1,Y2与Y3,Y4的高低电平,来控制电机的转动,从而让小车前进,后退,向左,向右。
接线ok后,编写main.py,给TOYBoard通电就ok了,下面是源代码。
5.源代码
import pyb
from pyb import UART
from pyb import Pin
M2 = Pin('X3', Pin.IN)
M3 = Pin('X4', Pin.IN)
N1 = Pin('Y1', Pin.OUT_PP)
N2 = Pin('Y2', Pin.OUT_PP)
N3 = Pin('Y3', Pin.OUT_PP)
N4 = Pin('Y4', Pin.OUT_PP)
u2 = UART(2, 9600)
while True:
pyb.LED(2).on()
pyb.LED(3).on()
pyb.LED(4).on()
_dataRead=u2.readall()
if _dataRead!=None:
#停止(读取手机APP传过来的指令,不同的软件指令可能不同,可以自己设定,在这里是默认的,下同)
if(_dataRead.find(b'\xa5Z\x04\xb1\xb5\xaa')>-1):
print('stop')
N1.low()
N2.low()
N3.low()
N4.low()
#向左
elif(_dataRead.find( b'\xa5Z\x04\xb4\xb8\xaa')>-1):
print('left')
N1.low()
N2.high()
N3.high()
N4.low()
#向右
elif(_dataRead.find( b'\xa5Z\x04\xb6\xba\xaa')>-1):
print('right')
N1.high()
N2.low()
N3.low()
N4.high()
#后退
elif(_dataRead.find(b'\xa5Z\x04\xb5\xb9\xaa')>-1):
print('back')
N2.high()
N1.low()
N4.high()
N3.low()
#向前
elif(_dataRead.find( b'\xa5Z\x04\xb2\xb6\xaa')>-1):
print('go')
N1.high()
N2.low()
N3.high()
N4.low()“Micropython如何DIY蓝牙智能小车”的内容就介绍到这里了,感谢大家的阅读。如果想了解更多行业相关的知识可以关注亿速云网站,小编将为大家输出更多高质量的实用文章!
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





