本篇文章为大家展示了ModelArts与HiLens是如何让车自己跑起来的,内容简明扼要并且容易理解,绝对能使你眼前一亮,通过这篇文章的详细介绍希望你能有所收获。
(可选,忽略亦可,取决于摄像头质量,对于相机畸变较大的需要先计算相机的畸变矩阵和失真系数,对图片进行校正)图片校正;
截取感兴趣区域,仅对包含车道线信息的图像区域进行处理;
对感兴趣区域使用透视变换;
针对不同颜色的车道线,不同光照条件下的车道线,不同清晰度的车道线,根据不同的颜色空间使用不同的梯度阈值,颜色阈值进行不同的处理。并将每一种处理方式进行融合,得到车道线的二进制图;
提取二进制图中属于车道线的像素;
对二进制图片的像素进行直方图统计,统计左右两侧的峰值点作为左右车道线的起始点坐标进行曲线拟合;
使用二次多项式分别拟合左右车道线的像素点(对于噪声较大的像素点,可以进行滤波处理,或者使用随机采样一致性算法进行曲线拟合);
计算车道曲率及车辆相对车道中央的偏离位置;
效果显示(可行域显示,曲率和位置显示)。
检测驾驶过程中道路中其他车辆状态,显示车辆类别、置信度,并通过YOLOv3进行检测车辆,然后返回的车辆检测框的坐标与当前坐标进行透视变换获取大约的距离作为车辆之间的距离dis。
说明:
本Demo的主体框架基于HiLens Kit已经基本开发完成,模型的选择为基于DarkNet53的YOLOv3模型,权重为基于COCO2014训练的数据集,而车道线的检测是基于OpenCV的传统方法实现的,所以计算量较大,导致整体速度较慢。
1)考虑到部署,已经测试过部署到HiLens Kit了,对了,也支持在HiLens Stuido运行模拟测试,更推荐在HiLens Studio哦,比较方便,而且不需要硬件支持,只需要在HiLens Kit或HiLens Studio上安装pillow库就行了,关于如何在HiLens Kit和HiLens Studio上安装第三方库,非常简单的哦,可参考:
在HiLens Kit上:https://bbs.huaweicloud.com/forum/thread-94316-1-1.html
在HiLens Studio上:https://bbs.huaweicloud.com/forum/thread-94317-1-1.html
2)如果想训练或优化,由没有硬件(比如GPU),那么很推荐使用ModelArts了,一站式开发,无缝衔接到HiLens Kit哦, 关于ModelArts的介绍可参考:https://www.huaweicloud.com/product/modelarts.html
同时也许还能提升下运行速度,这里介绍三种算法,亲测都可以部署到HiLens Kit推理使用哦,就在最新的AI Gallery(原AI市场)中哦,这里除了有算法,还有模型、数据集等等,很丰富,大家可以自己探索一下,同时还可以分享自己的算法给其他开发者,开发者订阅即可创建训练使用,很方便,相比于GitHub,不仅提供了源代码,还提供了用于训练的硬件资源,强大的Tesla V100 32GB版本哦。
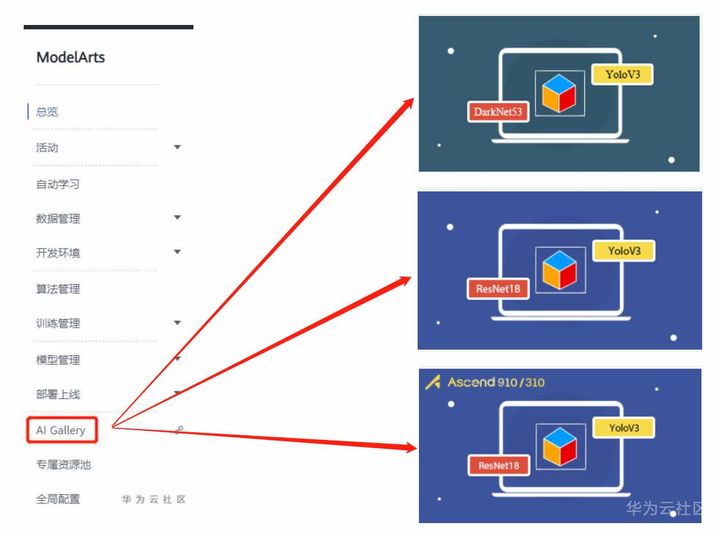
(1)YOLOv3_Darknet53,没错,就是著名的YOLOv3,经典的目标检测网络,后续又推出了YOLOv4、YOLOv5(暂称此名吧),AI Gallery也推出了YOLOv5的,不过由于PyTorch框架暂不支持模 型转换,所以暂时放弃了。
关于YOLOv3_Darknet53的使用方法,算法界面介绍很详细,这里就不赘述了,可以参考使用,注意模型转换部分请参考这篇博文中模型转换部分哦:https://bbs.huaweicloud.com/blogs/199870
算法备用链接为:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=2d52a07e-ccbd-420f-8999-2ea7b4bdd691
(2)YOLOv3_Resnet18(GPU),如果我们只想做车辆的检测或者为了简化模型,提高速度,可以选用主干网络为Resnet18的YOLOv3,网络更轻量,速度会快一些哦。
同样给上链接:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=948196c8-3e7a-4729-850b-069101d6e95c
(3)YOLOv3_Resnet18(Ascend 910),和上面(2)版本差异不大,主要改为由GPU换为Ascend 910训练的,大家可自由选择哦。
链接为:https://marketplace.huaweicloud.com/markets/aihub/modelhub/detail/?id=7087008a-7eec-4977-8b66-3a7703e9fd22
好了,算法部分解决了,数据怎么办呢?ModelArts的AI Gallery同样想到了,提供了数据集哦,免费订阅,下载到自己的OBS导入就能用了(注意OBS需要一定花费),这里我也提供了开源数据集的5164张人车图片,供大家使用哦,上链接:https://marketplace.huaweicloud.com/markets/aihub/datasets/detail/?content_id=a337272b-6918-4282-83d6-2b15e2a4c716
那么数据集和算法都有了,该训练了吧,在ModelArts上可以很好完成,凭借强大的Tesla V100 32GB或Ascend 910可以很快完成哦。
完成执行如视频中所示处理的一帧需要约300ms,也就是FPS约为3,不较慢,需要优化。我觉得还有很大优化空间,比如:
(1)预处理和后处理很费时间,真正推理很快,可以从这方面加速,不知道开启多线程是否有提升,应该有吧;
(2)应该可以更好发挥专用硬件,记得好像有DVPP和AIPP吧,可以用来做色域转换的操作;
(3) YOLOv3的后处理解析比较麻烦,这里用的是COCO的80类,但可以只用person、car两类,或者再加一点,同时nms也比较费时间,如果能用算子实现,融合到om模型中,会提速很多;
(4)这里使用的是Python,如果用C++应该会提升一些,执行效率会高很多吧。
上述内容就是ModelArts与HiLens是如何让车自己跑起来的,你们学到知识或技能了吗?如果还想学到更多技能或者丰富自己的知识储备,欢迎关注亿速云行业资讯频道。
免责声明:本站发布的内容(图片、视频和文字)以原创、转载和分享为主,文章观点不代表本网站立场,如果涉及侵权请联系站长邮箱:is@yisu.com进行举报,并提供相关证据,一经查实,将立刻删除涉嫌侵权内容。





